單輪車機器人之路徑追隨控制
Path Following Control of a Unicycle Robot
(101 柯俊廷)
摘要
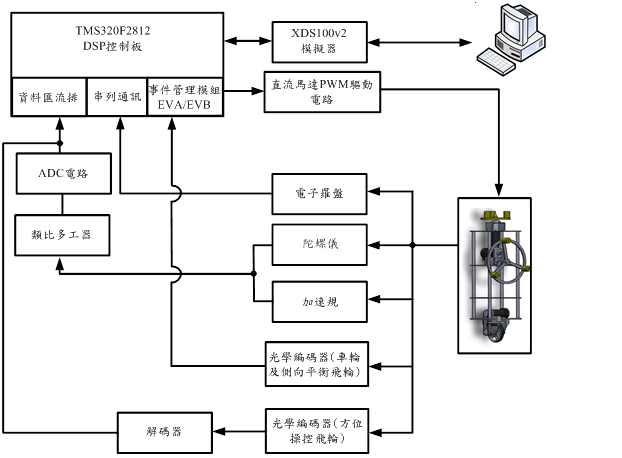
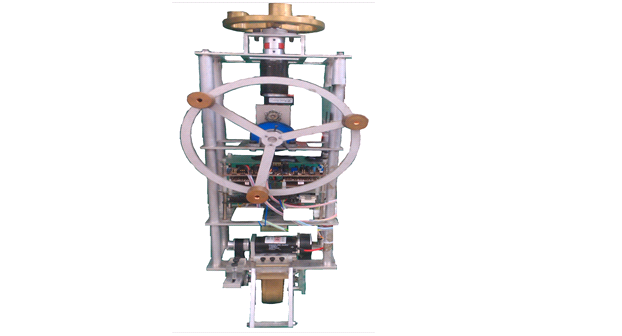
近年來輪型機器人的發展研究受到高度重視,單輪車機器人因僅有一個驅動輪與地面接觸,因此為極不穩定系統,故常被用來驗證各式非線性控制理論的效能。本論文旨在設計一單輪車系統,並使其能穩定平衡且達到軌跡追隨控制。論文中吾人以Euler-Lagrange法推導其完整的三維空間動態數學模型,再針對此數學模型進行系統模擬及順滑模態控制器設計,論文中吾人以加速規、陀螺儀及電子羅盤等慣性量測單元(inertial measurement units)來偵測系統姿態,並輔以互補濾波器以得到較佳之回授訊號,最後以數位訊號處理器(TMS320F2812)實現單輪車機器人路徑追隨控制。實驗證明所設計之系統可達到路徑追隨之目的。
| 系統架構示意圖 |
實體機構圖 |
 |
 |
| 影片成果展示 |
|
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|