以Linux-RTAI為基礎之雙足機器人 機電整合設計與實現
Mechatronic Design and Realization of a Linux-RTAI-Based Biped Robot
(101 趙冠舜)
摘要
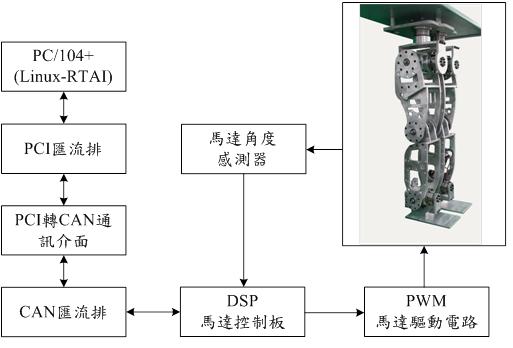
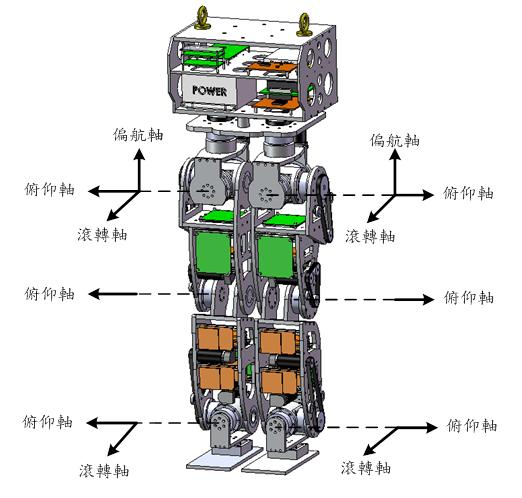
本論文旨在設計與實現雙足機器人系統。數學模型上,利用Denavit-Hartenberg表示法定義雙足機器人各關節軸的座標系,並使用逆向運動學以計算各關節軸之運動角度。機構設計上,利用電腦輔助設計工程繪圖軟體,設計雙足機器人整體機構。以真人雙腳作為設計範本,完成雙足機器人腰部以下之機電設計與整合。控制系統上,以PC/104+與RTAI-Linux作業系統作為控制核心平台,透過PCI轉CAN通訊介面和數位訊號處理器TMS320F2812,以數位訊號處理器之單板獨立的技術,搭配馬達驅動電路、光學編碼器與PID控制器,進而完成雙足機器人控制系統之建構。經由實驗驗證雙足機器人之行走姿態規劃及控制。
| 系統架構示意圖 |
十二軸自由度雙足機器人 |
 |
 |
| 雙足機器人實體圖 |
實作影片 |
 |
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|