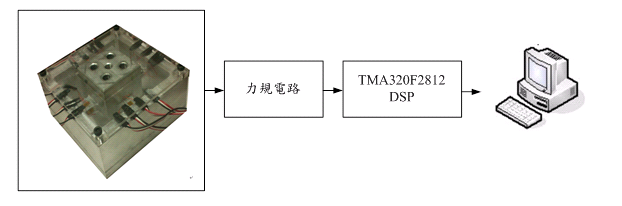
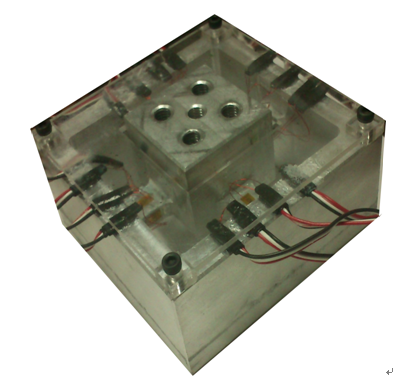
本論文旨在改善本實驗室先前所設計之雙足機器人的結構和發展機器人的六軸力感測器。在機械結構的部分,從改善機器人髖關節自由度、設計配重及用ANSYS Workbench軟體模擬機器人的結構以達到輕量化等三個方向做設計。在六軸力感測器上,吾人設計一個感測器的結構並用應變規來做量測應變規所得的輸出電壓必須經過解耦合矩陣及力-力矩的校正計算,才可得到所有軸向的力及力矩。最後實驗結果得知六軸力規的具有良好線性度,而,




、

和

線性度並不好,平衡控制而言只需

、

和

的軸向即可,所以此六軸力規適用於本實驗室之機器人系統。