二階順滑模態平衡控制之倒單擺系統
Balance Control of an Inverted Pendulum System Using Second-Order Sliding Mode Control
(102 許智韋)
摘要
倒單擺系統為一種構造簡單、響應快速、不穩定之非線性系統,故學術領域常用來驗證各種先進的控制理論。在本論文中探討以線性馬達為致動器,並以不同之控制器法則,達到倒單擺之平衡控制。本論文先以Euler-Lagrange方法對倒單擺系統建立動態數學模型,再依此模型設計LQR (Linear Quadratic Regulator)控制器、傳統順滑模態控制器以及二階順滑模態控制器,接著利用MATLAB/Simulink軟體進行模擬,最後將各自模擬結果互相比較。在實作上,本系統使用德州儀器公司(Texas Instruments, TI)所生產的數位訊號處理器TMS320F28335做為控制核心以實現倒單擺之平衡控制的目的。藉由模擬與實作結果得知,二階順滑模態控制具有較佳的性能及強健性。
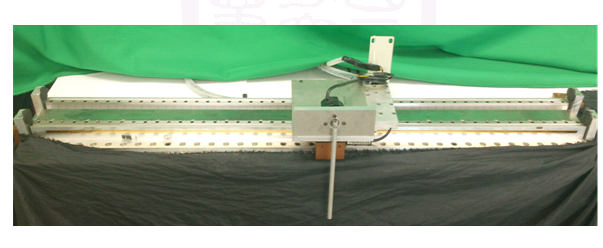
| 系統實體 |
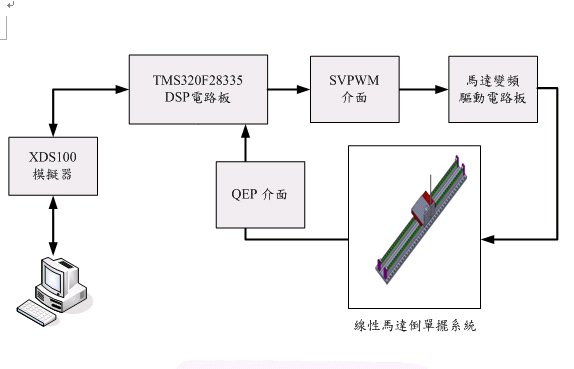
系統架構 |
 |
 |
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|