以全向移動機器人為致動器之二維倒單擺平衡暨軌跡追蹤控制
Balance and Tracking Control of a Spherical Inverted Pendulum with an Omnidirectional Mobile Robot
(102 韓宗衛)
摘要
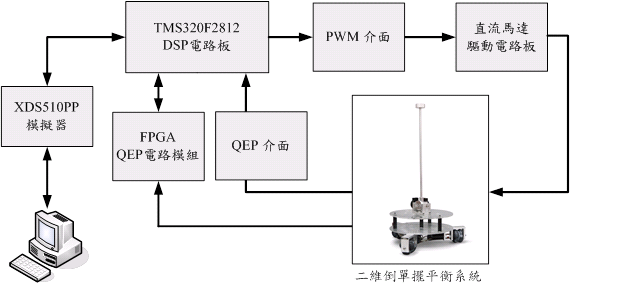
本論文旨在將倒單擺系統結合全向移動機器人,以建構二維倒單擺平衡暨軌跡追蹤控制系統。論文首先將以Euler-Lagrange方法建立倒單擺系統之動態數學模型,並針對此模型利用線性輸出調節控制法則與非線性輸出調節控制法則,設計平衡暨軌跡追蹤控制器。。在實作上,本系統使用德州儀器公司(Texas Instruments, TI)所生產的數位訊號處理器TMS320F2812做為控制核心以實現所有控制法,並配合周邊介面電路,進而完成倒單擺平衡暨軌跡追蹤控制與以慣性導航之軌跡追蹤控制。
| 軌跡示意圖 |
系統架構圖 |
 |
 |
| 實體圖 |
實作影片 |
 |
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|