姿態航向參考系統研發與雙足機器人之步態規劃
Development of an Attitude and Heading Reference System and Gait Pattern Planning of a Biped Robot
(103 黃彥翔)
摘要
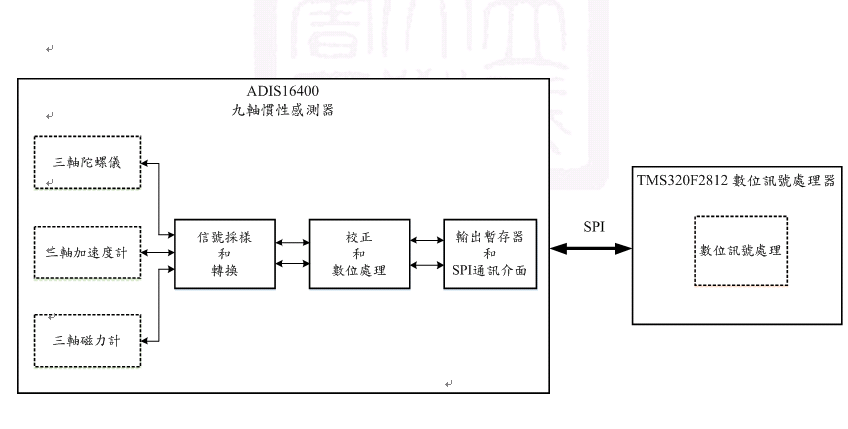
本論文旨在研究本實驗室先前所設計之雙足機器人的步態規劃、機器人控制系統架構和發展機器人的姿態感測器。在機器人步態規劃的部分,利用擺線輪廓曲線法為基礎以研究機器人的步態且藉由MapleSim和MATLAB軟體輔助模擬和驗證。在姿態感測器部分,以陀螺儀、加速度計及磁力計構成九軸慣性量測單元模組,透過感測器融合技術配合姿態演算法,以得到雙足機器人相對於大地座標之準確與靈敏的動態姿態。在論文中,吾人整合慣性量測單元模組與數位訊號處理器TMS320F2812完成姿態航向參考系統之建構,在感測器融合技術中,採用互補濾波器、增益調變互補濾波器和卡門濾波器,並建構一具三自由度姿態角驗證平台,以驗證姿態感測器之性能。
| IMU測試平台 |
系統架構圖 |
 |
 |
| IMU實體 |
實作影片 |
 |
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|