以影像為基礎之拋體軌跡預測及攔接
Vision-based Projectile Trajectory Prediction and Projectile Catching
(104 王翊)
摘要
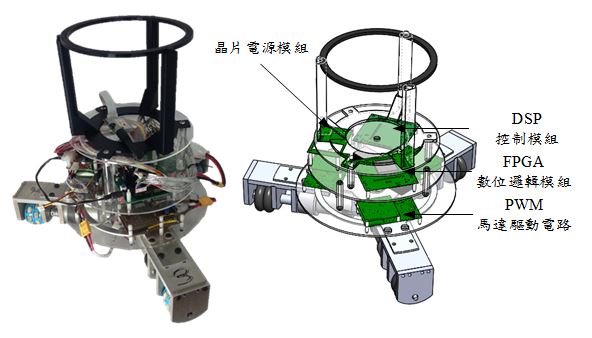
本論文旨在建構多相機視覺追蹤系統,並以該系統導引全向移動機器人攔接拋體。視覺追蹤系統中,利用兩個影像感測器模擬人類雙眼,依據拋體的色彩資訊進行視覺追蹤,將拋體座標經卡門濾波估測落點後,透過無線傳輸模組導引全向移動機器人至落點位置,同時藉由安裝在天花板上的相機將車體位置回授給全向移動機器人做控制。整個系統主要分成全向移動機器人、全景搖攝機構、影像處理模組、數位訊號處理模組和馬達控制器。由於利用拋體的色彩資訊作為目標物判斷依據,故使得本系統可以於複雜背景中進行攔接控制,且透過卡門濾波器估算出軌跡後,可使視覺追蹤系統的追蹤過程更為流暢。本論文透過模擬與實作分析並驗證整體系統之可行性,視覺追蹤系統確實可以將落點資訊估算出來,並由全向移動機器人攔接拋體。
| 系統架構圖 |
全向移動機器人系統之實體及示意圖 |
 |
 |
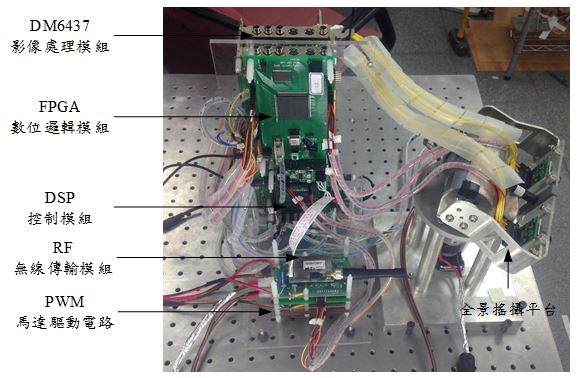
| 全景搖攝平台系統之實體圖 |
全景搖攝平台機構實體圖 |
 |
 |
| 實作影片 |
|
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|