以視覺為基礎之腕關節型機器人拍擊控制系統之設計與實現
Design and Implementation of a Vision-Based Paddle Juggling Control System using the Carpal Wrist Robot
(104 蕭家豪)
摘要
本論文旨在利用腕關節型機器人結合立體影像視覺系統,建構一個以視覺為基礎的拍擊系統。選用腕關節型機器人的原因在於它的自由度與構造相似於人類的手腕,運動上有高度的靈巧性,由於對稱且並聯式的架構,使其具有較高的負載承受能力。立體影像視覺系統中,利用兩個影像感測器模擬人類雙眼,依據拋體的色彩資訊進行目標物擷取,利用卡門濾波器針對拋體的軌跡進行估測,並利用質點拋體運動學對球體落點進行預測,以供機器人決定拍擊球體的時機、位置、速度與姿態。本論文透過模擬分析並且建構硬體實驗平台進行實作,驗證整體系統之效能,最後,影像視覺系統確實可以將落點資訊估算出來,並由腕關節型機器人完成拍擊的動作,且能持續拍擊球回彈至固定高度。
| 拍擊系統基本架構圖 |
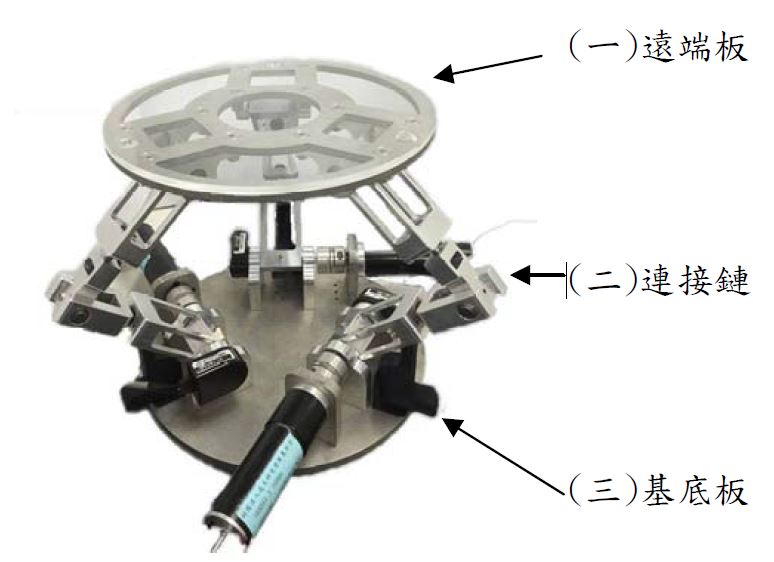
腕關節型機器人實體圖 |
 |
 |
| 實作影片 |
|
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|