雙足機器人步態規劃與實現
Gait Pattern Planning and Realization of a Biped Robot
(105 鍾東霖)
摘要
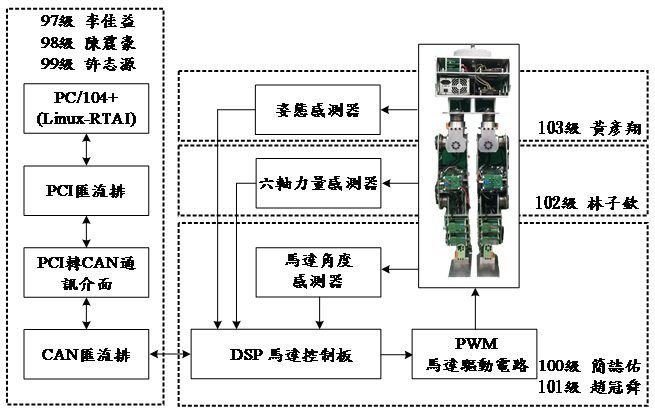
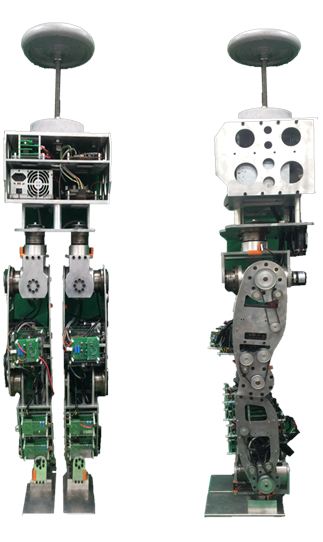
本論文旨在使用本實驗室先前所設計之雙足機器人的控制系統架構、力量感測器與姿態感測器,實現雙足機器人之步態規劃。在機器人步態規劃方面,利用擺線輪廓曲線法和一個三次多項式為基礎規劃機器人的步態,且藉由MATLAB和anyKode Marilou軟體輔助模擬和驗證;在實作方面,在馬達控制迴路裡增加電流回授,使馬達具穩定的輸出力矩。在感測器部分,利用力量感測器量測機器人行走時的零力矩點,以確認步態規劃的可行性;利用姿態感測器量測機器人行走姿態,得到雙足機器人的動態姿態以供給日後回授之用。在論文中,吾人整合工業電腦PC104/+與數位訊號處理器TMS320F2812完成雙足機器人步態規劃之實現。使用PC/104+做為主控制器,以CAN為通訊介面對數位訊號處理器下達馬達控制命令,以完成各關節之角度控制,並以力量感測器系統與姿態感測器完成感測訊號的量測。
| 系統硬體架構圖 |
雙足機器人實體圖 |
 |
 |
| 實作影片 |
|
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|