控制力矩陀螺致動之二維倒單擺系統平衡控制
Balance Control of a Two-Dimensional Inverted Pendulum System Actuated by Control Moment Gyroscopes
(105 陳之凱)
摘要
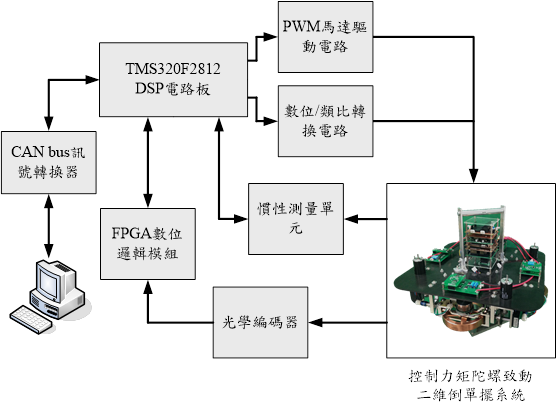
本論文旨在設計以控制力矩陀螺為致動器之二維倒單擺系統,與其他種類的致動器相比,控制力矩陀螺擁有較小的體積卻可產生較大之力矩,有助於減少機構的體積。系統先以Euler-Lagrange的方法建立動態數學模型,接著使用物理建模軟體MapleSim建構系統模型,並加入所設計的平衡控制器進行電腦模擬,評估控制系統的可行性,系統姿態的部分,使用以陀螺儀、加速規及磁力計組成的慣性測量單元,經由感測器融合的技術配合姿態演算法,得到系統相對於大地座標的三軸姿態角,在實作上,本系統以數位訊號處理器TMS320F2812做為控制核心並使用C語言撰寫卡門濾波器、平衡控制器等演算法,並配合周邊電路,進而完成二維倒單擺的平衡控制。
| 系統硬體架構圖 |
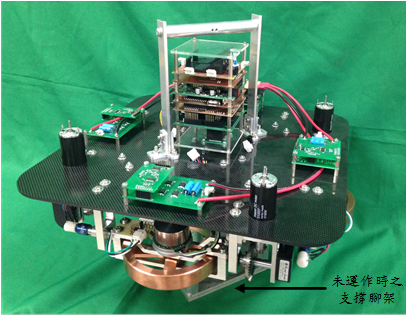
控制力矩陀螺致動二維倒單擺系統實體圖 |
 |
 |
| 實作影片 |
|
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|