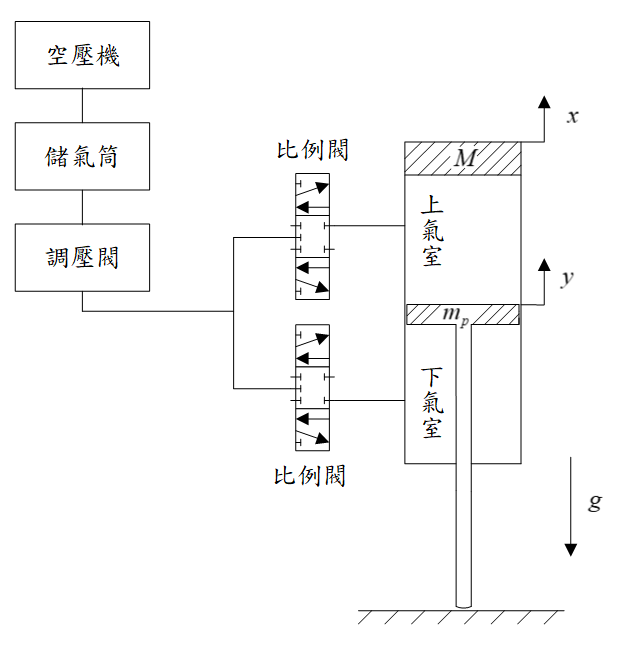
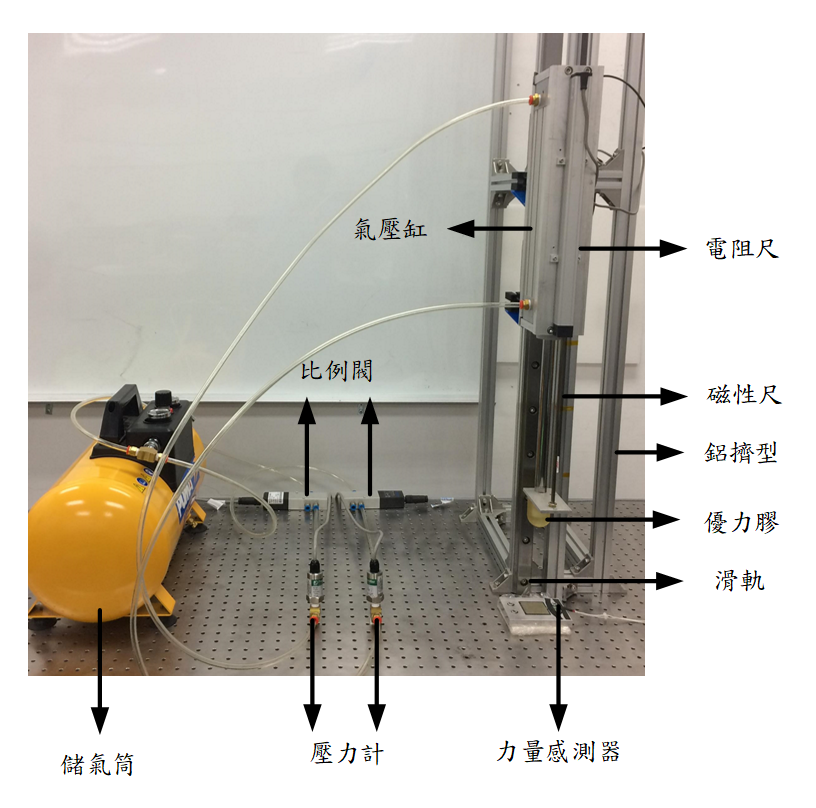
The aim of this thesis is to design and implement the vertical pneumatic single-legged hopping robot using second order sliding mode control. First, analysis the energy of a linear mass–spring system is given and this energy analysis is used to determine the hopping cycle and height for a pneumatic vertical hopping robot. The mathematical model of the system is derived Super-twisting control of the second order sliding mode control is designed to control the mass flow rate for the upper chamber and sub-optimal control of the second order sliding mode control is designed to control the mass flow rate of the lower chamber. The simulation studies are conducted in MATLAB/Simulink. In experiments, a proportional valve is used for control actuation. The coefficients of the proportional valve is calibrated by the least-squares method. For feedback control, the strokes of pneumatic cylinder rod and the hopping height of the cylinder are measured by a potentiometer and a magnetic encoder, respectively. The control schemes are implemented on a digital signals processor (TMS320F2812) from Texas Instruments using C language. From simulation and experimental results, it is show that the designed sliding mode controllers can achieve effective hopping control of the pneumatic single-legged robot.