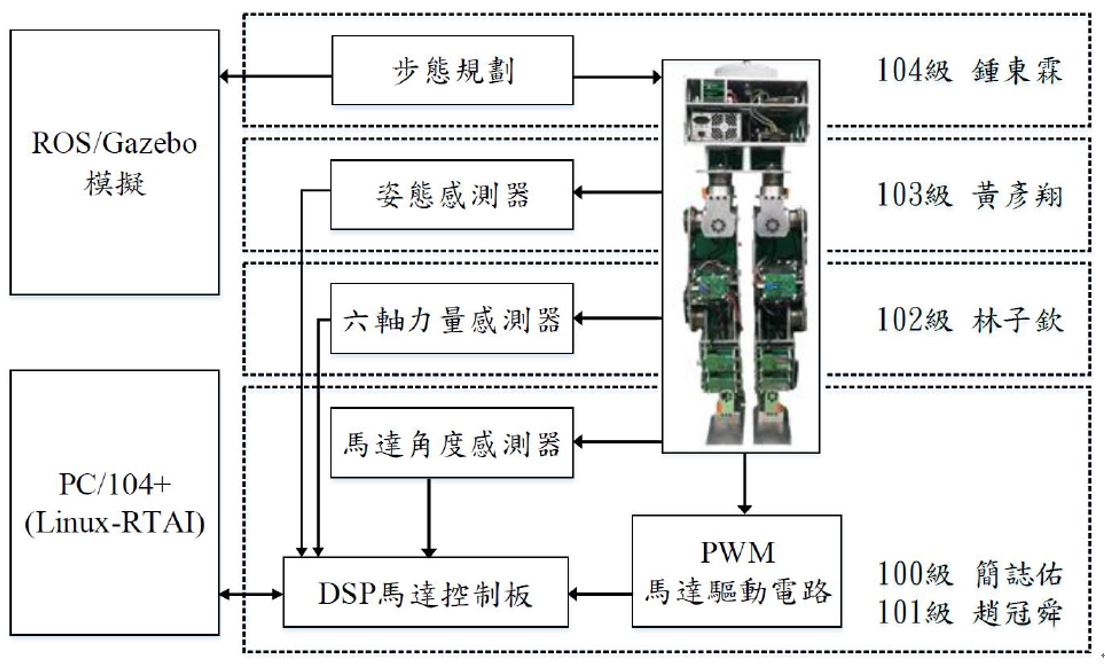
The aim of this thesis is to use ROS and Gazebo based on Linux to integrate a simulation environment for development and simulation of a bipedal robot. Gait pattern planning is based on the cycloidal profile and cubic spline interpolation.
Inverse kinematics is obtained by Moveit plugin which is based on Rviz. For sensors, the force sensor model is used to measure the zero moment point of the walking robot and an interial measurement unit sensor model is used to obtain the dynamic posture of the robot. Then simulation the data of sensor models and the data of each joint are displayed through the graphical user interface of rqt.
Eventually, this simulation environment is able to help us to validate and verify the feasibility of gait planning.