SCARA機器人最佳時間運動規劃之實現
Implementation of Time-Optimal Motion Planning for SCARA Robots
(107級 張津瑋)
摘要
SCARA機器人是一種結構簡單、移動速度快、高精準度的機械手臂,在工業上廣泛被使用,本論文旨在探討SCARA機器人的最佳運動規劃,吾人以Euler-Lagrange方法建立機器人之數學動態模型,並且計算出系統的逆向運動學與Jacobian矩陣,選用的路徑如直線、圓形及不同的補間方法,再以相平面法規劃出最短時間路徑且滿足力矩限制條件,使用MATLAB軟體利用相平面法計算出路徑命令,在Linux環境中使用Gazebo進行動態模擬,建構出SCARA機器人的物理模型,並使用插件對SCARA機器人的各關節下達角度命令以觀察動態響應,最後在EPSON公司所生產的SCARA機器人上驗證所得的運動規劃之效能。
The SCARA robot is a robotic arm with simple structure, high speed, and high precision. It is widely used in industry. The aim of this thesis is to study optimal motion planning of an SCARA robot. The Euler-Lagrange method is used to derive the dynamic model of system and the inverse kinematic formula and Jacobian matrix are obtained. The chosen paths are based on the straight line, circle, and different kinds of interpolation methods. The minimum-time path is planned using the phase plane method which can meet the torque constraints, and the phase plane method is realized in MATLAB to obtain path commands. In a Linux-based environment, Gazebo is used to contruct and simulate the dynamic model of the SCARA robot. The angular command of every joint is given to the plugin of Gazebo to obtain the dynamic responses. Finally, this motion planning method is tested on an EPSON’s SCARA robot for the performance validation.
| SCARA機器人實體圖 |
 |
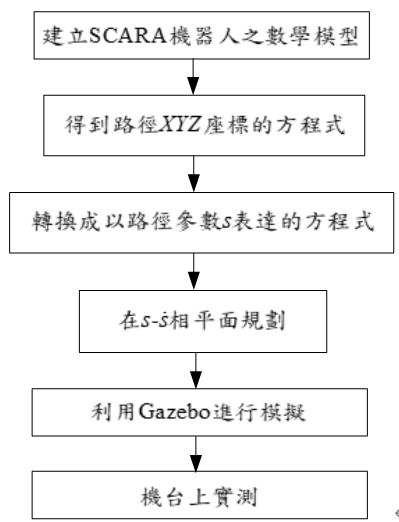
| 論文流程圖 |
 |
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|