二維倒單擺之平衡暨追蹤控制
Balance and Tracking Control of a Spherical Inverted Pendulum
(108級 曲靖淳)
摘要
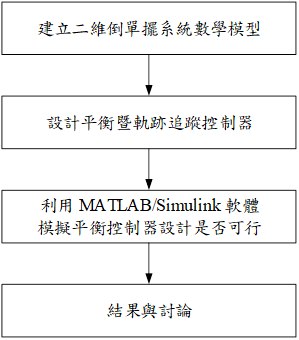
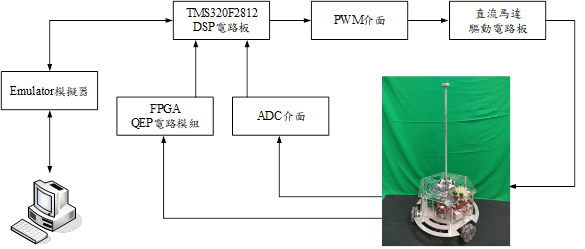
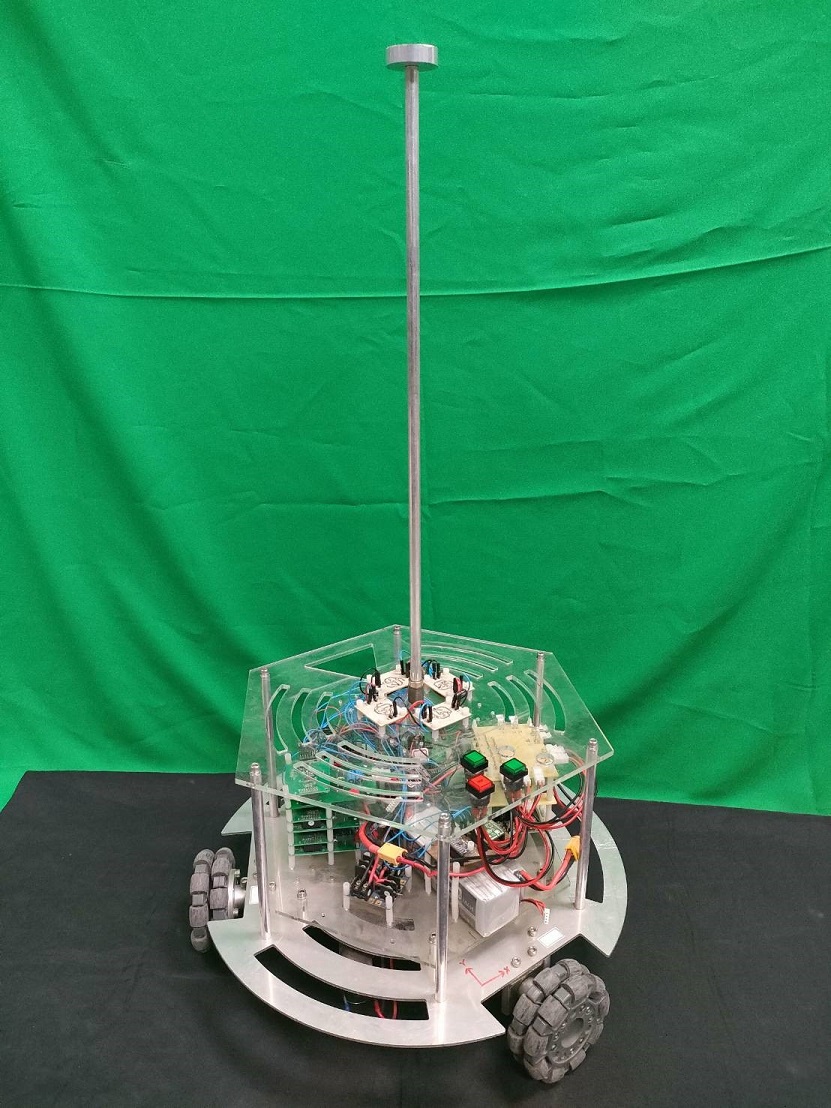
本論文旨在將倒單擺系統結合全向移動機器人,並建構二維倒單擺平衡控制系統。論文主要分成兩部分:(一)首先利用Euler-Lagrange方法建立倒單擺系統之動態數學模型,結合全向移動機器人及馬達模型,進而建立全向移動機器人致動二維倒單擺之完整數學模型,並以超螺旋控制法則(super-twisting algorithm, STA)設計二階順滑模態(second-order sliding mode)平衡控制器;(二)利用(一)所推導出數學模型,針對此系統以未解耦合方式設計非線性輸出調節(nonlinear output regulation )控制器,並透過MATLAB/Simulink軟體來進行模擬,驗證計算上的正確性。而本論文中使用磁鐵與霍爾元件來作為倒單擺的角度量測方式,以裝置於單擺上的磁鐵,藉由霍爾元件來感應磁場的變化,進而量測角度。在實作上,本系統使用德州儀器公司(Texas Instruments, TI)所生產的數位訊號處理器TMS320F2812做為控制核心以實現所有控制法則,並配合周邊介面電路,進而完成倒單擺平衡控制。
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|