以陀螺效應平衡之單輪機器人運動控制
Control of the Gyroscopically Balanced Unicycle Robot
(109級 廖柏翔)
摘要
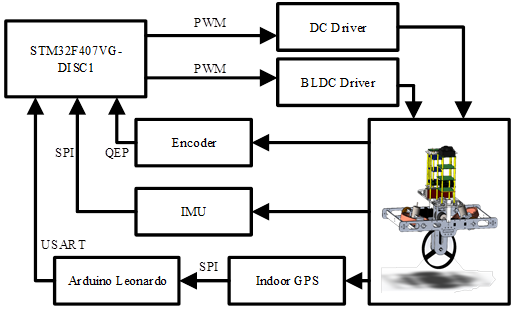
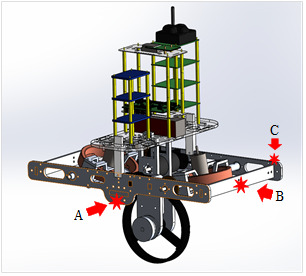
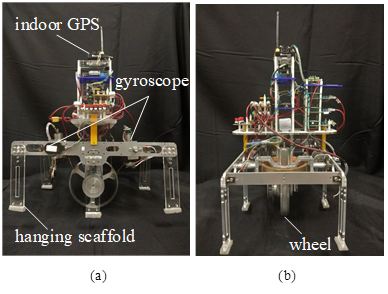
本論文旨在研究以控制力矩陀螺儀為致動器之單輪機器人系統,目的為改善以反應輪為致動器時所提供側向平衡力矩不足而造成系統強健性不彰的問題,因控制力矩陀螺儀擁有較小的體積卻可產生較大的力矩。論文中先以Euler-Lagrange的方法建立數學動態模型,再將系統模型線性化後,使用MATLAB設計平衡控制器,再於Simulink中建構控制系統模型進行模擬,評估控制系統的強健性及可行性。在實作的部分,本論文以光學編碼器量測車輪及陀螺翻轉角度,以加速規、陀螺儀及電子羅盤等慣性量測單元(inertial measurement units)來偵測系統姿態,再利用室內定位模組來取得系統之即時位置資訊,最後以STM32F407開發板為核心並使用C語言撰寫控制器,進而達成以控制力矩陀螺儀之單輪機器人平衡控制;而本論文亦設計路徑追隨控制器,並以模擬探討路徑追隨之可行性及相關問題。
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|