麥卡倫輪型移動機器人之路徑追蹤控制
Trajectory Tracking Control of the Mecanum -Wheeled Mobile Robot
(109級 洪瑋呈)
摘要
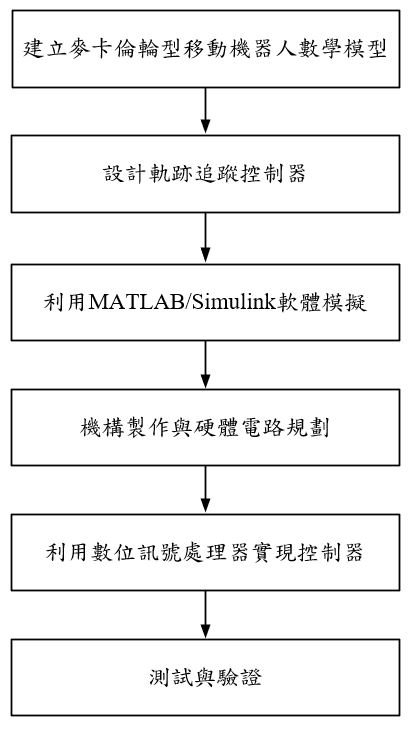
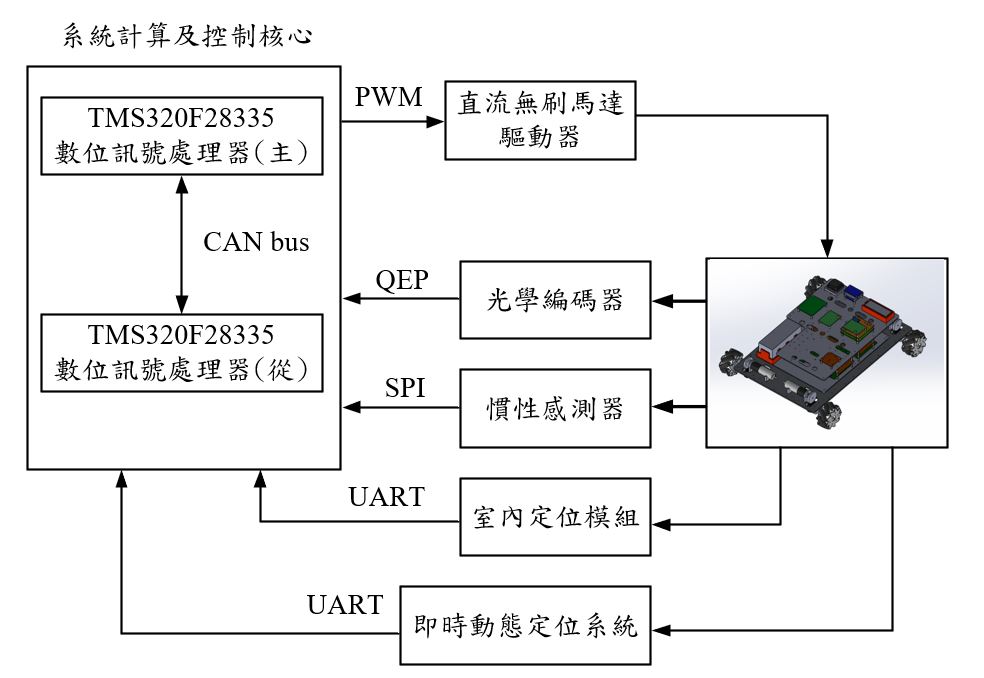
麥卡倫輪型移動機器人具有可任意在平面上移動而不需改變其姿態及可任意旋轉的優點,不管在學術界或產業界上都有相關的研究或應用。本論文主旨在於設計與實現麥卡倫輪型移動機器人系統軌跡追蹤控制。麥卡倫輪型移動機器人為一非完整約束系統,論文中將先以Euler-Lagrange方法搭配Lagrange multiplier推導出麥卡倫輪型移動機器人之動態數學模型,針對此模型利用狀態回授線性化消除系統之非線性項,分別結合PID控制與順滑模態控制設計軌跡追蹤控制器,並利用MATLAB/Simulink模擬可能性。在實作上,本系統以數位訊號處理器做為控制核心,以C語言實現控制演算法,並利用慣性感測器、室內定位模組、即時動態定位系統回授機器人位置與姿態,用以消除光學編碼器因車輪滑動而造成的回授軌跡誤差。最後,由模擬與實驗結果驗證了所完成之系統可達到軌跡追蹤之目的
| 研究步驟流程圖 |
 |
| 系統架構圖 |
 |
| 影片成果展示 |
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|