控制力矩陀螺儀致動自行車之輔助平衡控制
Balancing Assistance of the Bicycle with Control Moment Gyroscopes
(109級 蔡政育)
摘要
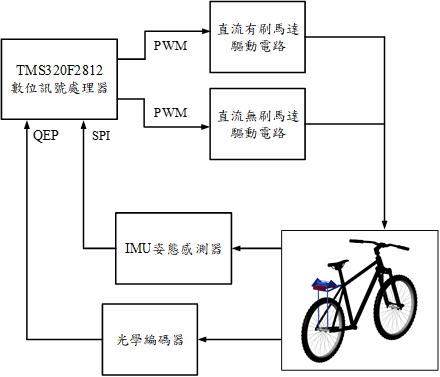
自行車在不加以控制之下,是一個不穩定的系統,本論文旨在研究以控制力矩陀螺儀為致動器,設計及實現自行車之輔助平衡系統,用以增進騎乘的穩定性與安全性。控制力矩陀螺儀擁有較小的體積卻可產生較大力矩之優點,適合做為自行車輔助平衡力矩之提供來源。論文中先以Euler-Lagrange的方法建立數學動態模型,接著使用Simscape建構系統動態模型,並加入所設計的輔助平衡控制器進行電腦模擬,評估控制系統的可行性。在實作的部分,本系統以數位訊號處理器做為控制核心並使用C語言撰寫輔助平衡控制器程式,以光學編碼器及慣性測量單元提供控制回授,實現以控制力矩陀螺儀為致動器之自行車輔助平衡系統。由模擬及實驗結果顯示,有加入輔助平衡系統之自行車比沒加入輔助平衡系統之自行車穩定性還要好。
| 研究步驟流程圖 |
 |
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|