(A Study on Improving the Gait Control System for a Biped Robot)
(110級 林翰威)
摘要
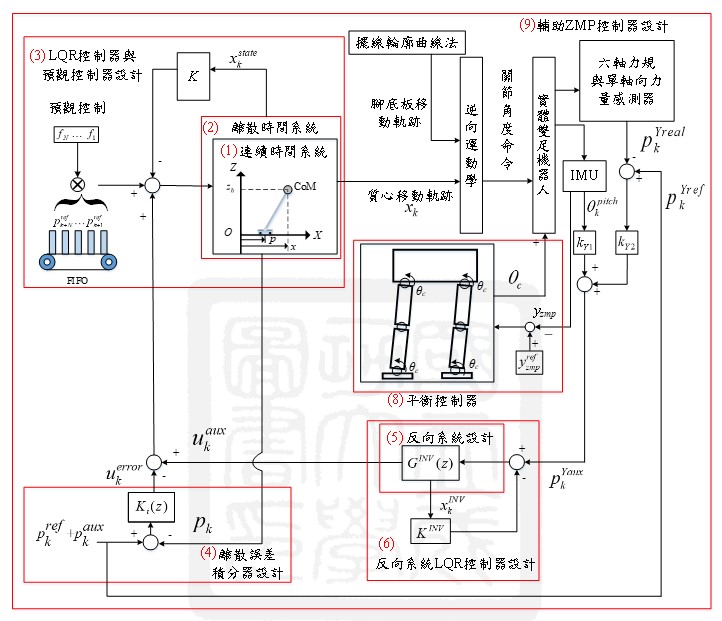
本論文旨在針對雙足機器人的步態控制系統,改善前人設計的六軸力規感測器,並在前人設計的步態控制系統架構中加入抑制搖晃的平衡控制器,最後加入無線分享器,用以設定通訊協定連接機器人的主控電腦,進而可直接從外界電腦下達步態任務指令。在力規感測器上,吾人將六軸力規感測器的量測腳底板與地面之間正向力的部分,進行分開量測,使用吾人設計的荷重元(load cell)機構量測,並建立校正曲線驗證準確性與重現性,實驗結果與前人的結果相比準確性提升約50 %。控制器方面,吾人建立單質量倒單擺數學模型,假設虛擬的阻尼與彈簧,推導動態方程式,藉由調整踝關節的角度,能抑制雙足機器人在步態任務過程中因移動或是系統不穩定性產生的搖晃。最後結合前人設計的預觀控制器(preview controller),可以降低系統零力矩點(Zero Moment Point, ZMP)輸出與規劃零力矩點命令之間的追蹤誤差,提升雙足機器人步態的穩定性,其中零力矩點是機器人判斷穩定性的重要條件之一。在通訊方面,為了使雙足機器人脫離連接監控螢幕與電腦,不受到線材長度的限制,吾人使用無線分享器設定SSH (Secure Shell)的通訊協定及連接埠,可從非本地端的電腦進行連接進入雙足機器人搭載的主控電腦下達步態任務的命令,成功擺脫因線材長度限制行走距離及靈活性受限的問題。