基於 FPGA 的即時立體視覺系統之拍擊耍弄機器人的設計與實現
(Design and Implementation of a Paddle Juggling Robot with an FPGA-based Real-time Stereo Vision System)
(110級 楊唯駿)
摘要
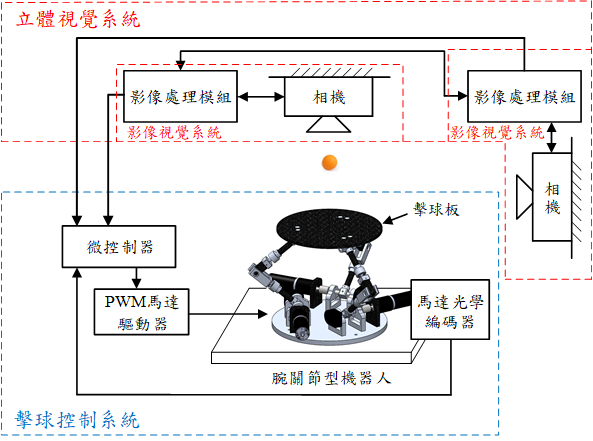
本論文旨在延續並改進本實驗室所發展的腕關節型機器人拍擊系統,以立體視覺引導機器人擊球,達到連續拍擊球之目的。本系統由立體視覺系統與擊球控制系統兩個子系統組成,其中,立體視覺系統由兩組影像視覺系統構成,每組影像視覺系統各由一部魚眼相機與影像處理模組構成,影像視覺系統可以依據明亮度資訊判別球,經過影像處理後輸出目標物在影像上的座標;擊球控制系統則可以將立體視覺系統輸出的兩個像素座標換算為目標物在空間中的位置,並利用擴展卡門濾波器(extended Kalman filter)針對球的位置與速度進行估測,並利用質點拋體運動學對球的拍擊點與入射速度進行預測,用以決定機器人拍擊球體的時機、姿態與速度。在實作上,立體視覺系統利用以現場可程式化邏輯閘陣列(Field Programmable Gate Array, FPGA)為基礎之開發板做為影像處理核心,並使用硬體描述語言Verilog撰寫影像處理演算法與各種周邊功能。擊球控制系統以STM32微控制器作為控制核心,並使用C語言撰寫與影像處理模組間的通訊協議、擴展卡門濾波器、馬達控制器等演算法。兩系統整合後,能持續拍擊使球回彈至固定高度,並經常可連續拍擊達1500次以上,相較於上一代拍擊系統的150次有很大的進步。
| 系統架構圖 |
 |
影片成果展示 |
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|