雙軸驅動龍門系統之控制設計與實現
(Control Design and Implementation of the Dual-Drive Gantry System)
(110級 陳威安)
摘要
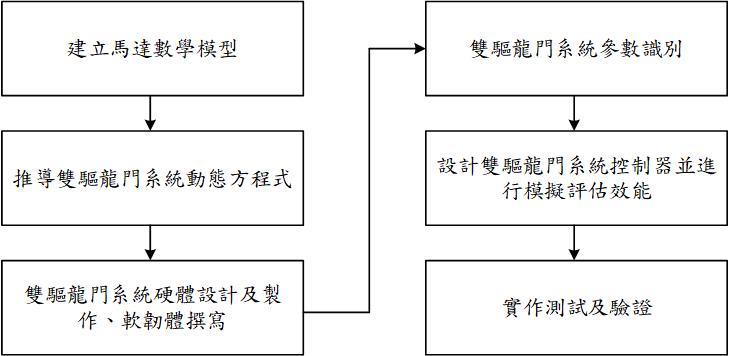
本論文旨在研究雙軸驅動龍門系統的控制方法與實現。論文中先以 Euler-Lagrange 的方法建立數學動態模型,再將動態模型經過線性化、 參數變換與解耦合後設計補償控制,接著於 Simulink 中進行模擬,評估 不同方法的控制效能與可行性。在雙驅龍門系統的機構的設計上,吾人 可轉換系統為軟性結構或剛性結構,以利探討兩種結構對控制造成的影 響。在實作上,本系統以數位訊號處理器做為控制核心,並使用 C 語言 撰寫演算法進行控制。吾人使用 A、B、C 三種控制方法,在負載擺放 於不同位置下,分別控制軟性結構與剛性結構之雙驅龍門系統,探討各 個方法的控制效能。三種方法中,軟性結構下之 A 方法可以應付負載變 動所造成的干擾,且具有最佳的追蹤誤差。
| 研究步驟流程圖 |
 |
影片成果展示 |
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|