基於整合慣性導航系統/定位系統之室內/室外導航系統的實現
(Implementation of an Indoor/Outdoor Navigation System Based on the Integration of Inertial Navigation System/Positioning System)
(111級 張立辰)
摘要
本論文旨在利用慣性導航系統(Inertial Navigation System)與定位系統整合實現位置、速度及姿態測量運算。論文首先介紹各座標系及不同座標系間的轉換,再介紹定位系統與慣性量測單元的誤差來源與校正方法。接著,推導慣性導航系統的位置、速度及姿態方程式。最後,由位置、速度及姿態方程式與感測器誤差設計誤差卡門濾波器,估測各誤差並回授補償至慣性導航系統,實現慣性導航系統與定位系統耦合演算法。在實作的部分,本論文首先收集定位系統及慣性量測單元的測量值再以MATLAB實現感測器整合演算法並調整其參數,以評估演算法的可行性,後以數位訊號處理器為運算核心並使用C語言撰寫感測器整合演算法。最後,使用磁性尺及自製三軸校正平台驗證小範圍移動下演算法之性能,再由衛星空拍圖驗證大範圍移動時演算法之性能。由實驗證明本論文之慣性導航系統/定位系統鬆耦合(loosely couped)整合演算法於室內及室外皆可獲得一定精度的位置、速度及姿態導航解。
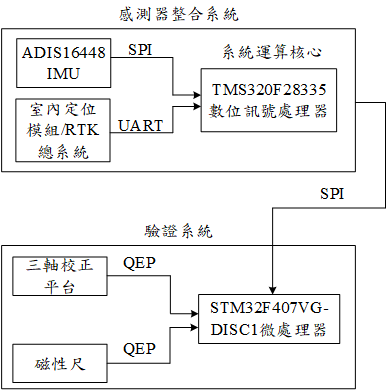
| 系統架構圖 |
 |
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|