PID迴路整形及其在撓性臂定位控制上之應用
PID Loop Shaping and Its Application to Positioning Control of Flexible Beam
(92 林品宏)
摘要
迴路整形法的設計概念,在於利用控制理論的強健性能條件在波德圖面上形成限 制,以求得符合條件的迴路轉移函數,進而得到控制器,並將控制器的設計過程圖形化。而在設計的過程上我們可以發現此種方法存在了一些缺點:(1)通常受控體的階數越高,所求出來的控制器階數也會越高,這使得不管是利用程式或者是電路來實現控制器都是一種負擔。(2)在波德圖上調整迴路轉移函 數使其滿足強健性能條件,這通常需經由不斷地嘗試錯誤來獲得,此將消耗較多的時間,況且是否有解並不可事先預知。
本實驗將PID控制器導入迴路整形法中,形成PID迴路整形方法來改善這些缺點。最後我們使用PID迴路整形方法來設計撓性臂系統的定位控制系統,藉以驗證PID迴路 整形方法的可行性。並將其定位性能與Ziegler-Nichols方法所設計的PID控制器的性能作一比較。
| 撓性臂系統架構圖 |
|
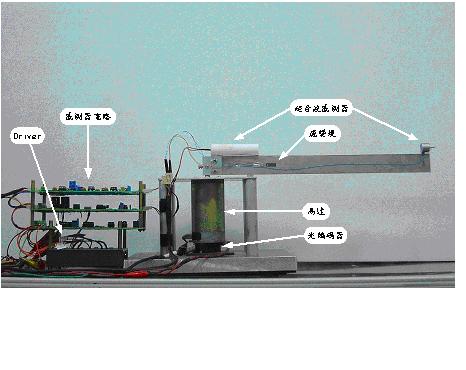
| 撓性臂系統實體圖 |

|
| 影片成果展示 |
|
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|