利用順滑模態之球與弧系統的平衡控制
Balance Control of Ball and Arc Systems via Sliding Mode Control
(96 呂育勝)
摘要
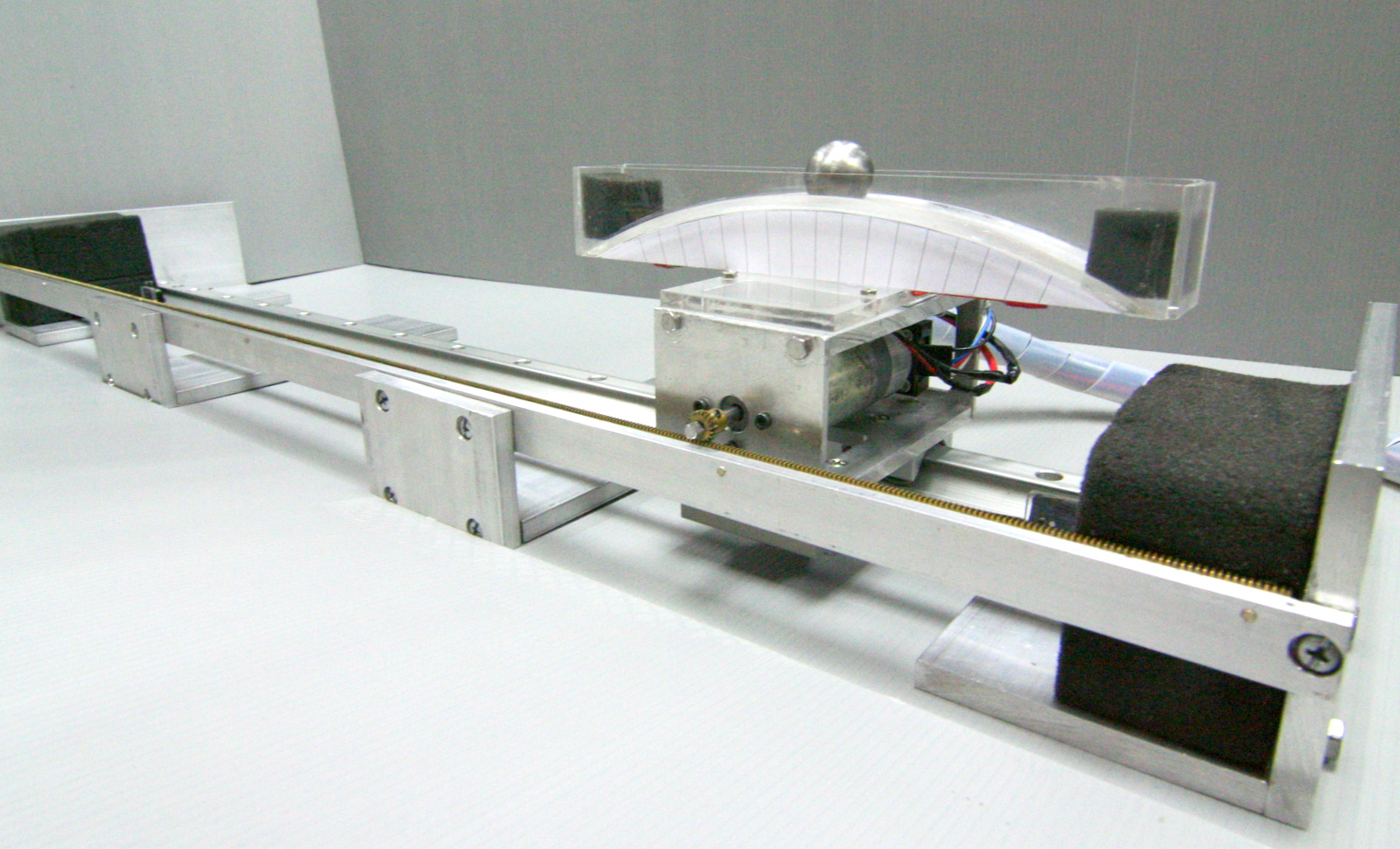
在過去幾年來欠制動性系統的穩定化及性能設計受到相當高的重視,又因為許多教學實驗用途的機電系統先天上為非線性且不穩定的系統,基於上述之原因,本實驗旨在提出新的機電實驗系統架構,此簡單的機電系統稱為「球與弧系統」,球與弧系統為一不穩定的非線性系統,其機械結構為欠制動系統,故適用於驗證各種控制理論。球與弧系統是由球、台車與弧面所組成,此系統是利用台車位置及球角度感測器作為回授信號,控制之目的為控制直流馬達驅動台車使球立於弧面上並保持平衡不落下。首先利用了Euler-Lagrange方法建立系統的動態數學模型,由動態數學模型可知,本系統具有極為複雜的非線性項,並設計順滑模態控制器來平衡球與弧系統,由於順滑模態控制器強健性優越,對本系統中的非線性項、雜訊與外界干擾能有效地抑制,使球能快速地收斂至不穩定的平衡點。
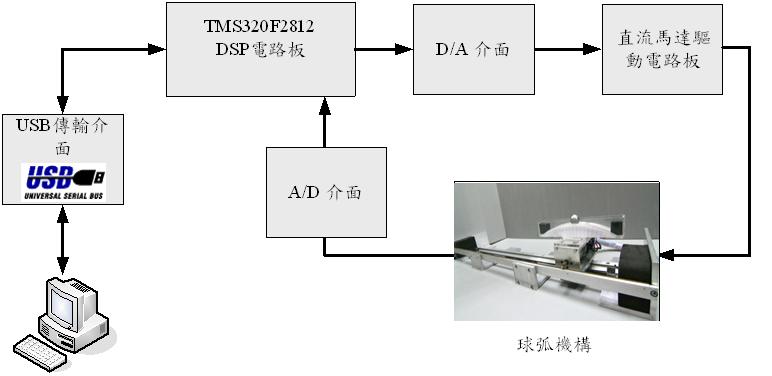
本實驗以數位訊號處理器為核心來實現順滑模態控制器,其硬體架構包含了機械結構、馬達致動器、感測器、控制器與自行設計之週邊介面電路,進而完成了一套球與弧系統。最後以模擬結果及實驗結果來驗證理論及實作之一致性。
| 球與弧系統架構圖 |
|
| 球與弧系統實體圖 |
|
| 影片成果展示 |
|
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|