全向移動機器人之路徑追蹤控制
Trajectory Tracking Control of an Omnidirectional Mobile Robot
(96 翁義清)
摘要
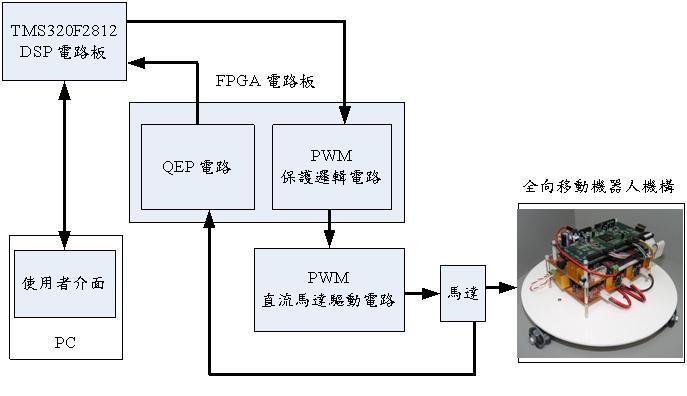
全向移動機器人為一種特殊之輪式機器人,具有可任意在平面上移動而不需改變其姿態的優點。本實驗旨在推導出全向移動機器人之動態數學模型,針對此模型利用計算轉矩(computed torque)控制法則消除系統之非線性項,並結合PID控制法則設計軌跡追蹤控制器。控制器的實現是以數位信號處理器(digital signal processor, DSP)為基礎,使用德州儀器公司所生產之定點式數位信號處理器,型號為TMS320F2812。在周邊電路的部份,使用Altera公司生產之Cyclon系列的FPGA設計了QEP (quadurature encoder pulse)電路,作為接收馬達編碼器回授信號的介面。實作方面以C語言來實現所有控制演算法,透過DSP控制板來提供系統控制力的運算及輸出,再搭配PWM驅動電路驅動直流馬達帶動全向移動機器人完成路徑追蹤的控制目的。由模擬與實驗結果顯示,所完成之控制系統可達到軌跡追蹤之目的。
| 全向移動機器人系統架構圖 |
|
| 全向移動機器人系統實體圖 |

|
| 影片成果展示 |
|
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|