以視覺伺服為基礎之舉球控制系統之研製
Design and Implementation of Vision-Based Ball Lifting
(97 張居強)
摘要
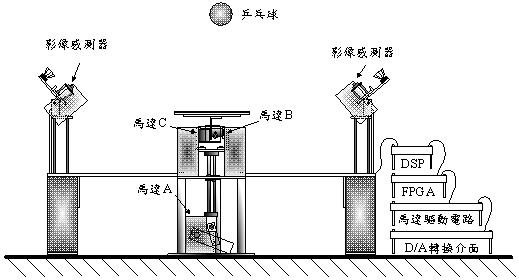
本論文採用數位訊號處理器(digital signal processor, DSP)及可程式邏輯閘陣列(field programmable gate array, FPGA)為平台,建構出乒乓球在三維空間中的軌跡追蹤與舉球視覺伺服控制系統。整個系統主要可分為舉球機構、影像處理模組、影像感測器、數位訊號處理器與舉球控制系統。其中,影像處理模組以可程式邏輯閘陣列來完成;影像感測器則是採用CMOS黑白影像感測器;而追蹤控制器部份是以數位訊號處理器為控制核心。在實作上,首先利用CMOS影像感測器擷取影像,經由FPGA進行影像演算法求得乒乓球在影像平面中的座標並透過DSP計算出乒乓球在三維空間中的軌跡,使用軌跡決定擊球時間、擊球速度與擊球平板的旋轉角度,最後透過PID控制器進行馬達控制。經過驗證與分析後,本論文證實了演算法的可行性,並完成了以視覺伺服為基礎之舉球控制系統。
| 舉球控制系統之架構圖 |
|
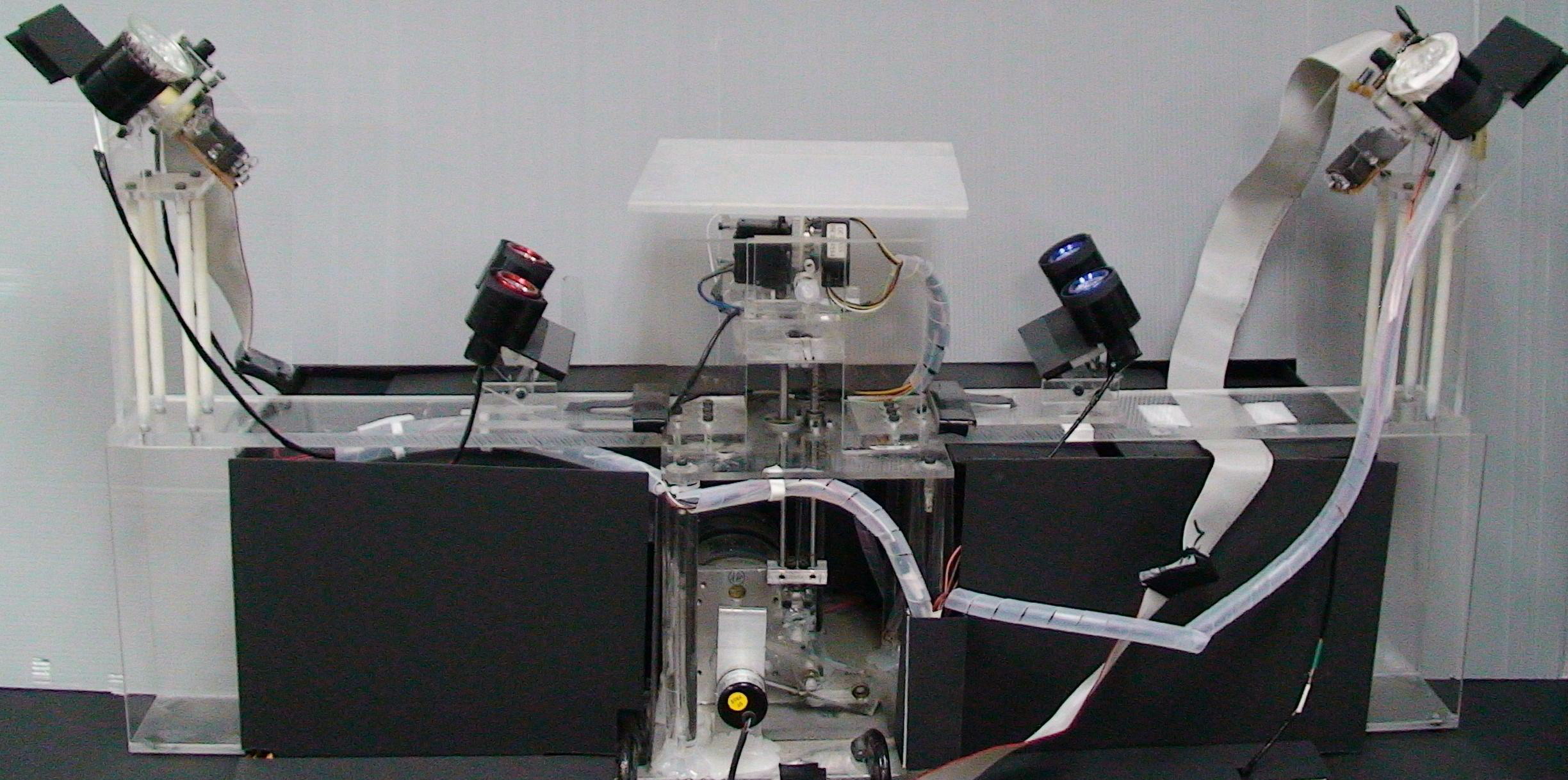
| 舉球控制系統之實體圖 |
|
| 影片成果展示 |
|
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|