以數位訊號處理器為基礎之磁浮控制系統設計與實現
Design and Implementation of DSP-Based Magnetic Levitation Control Systems
(97 張雲清)
摘要
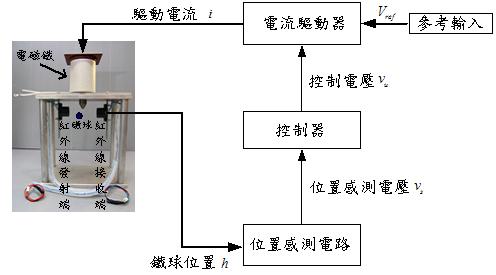
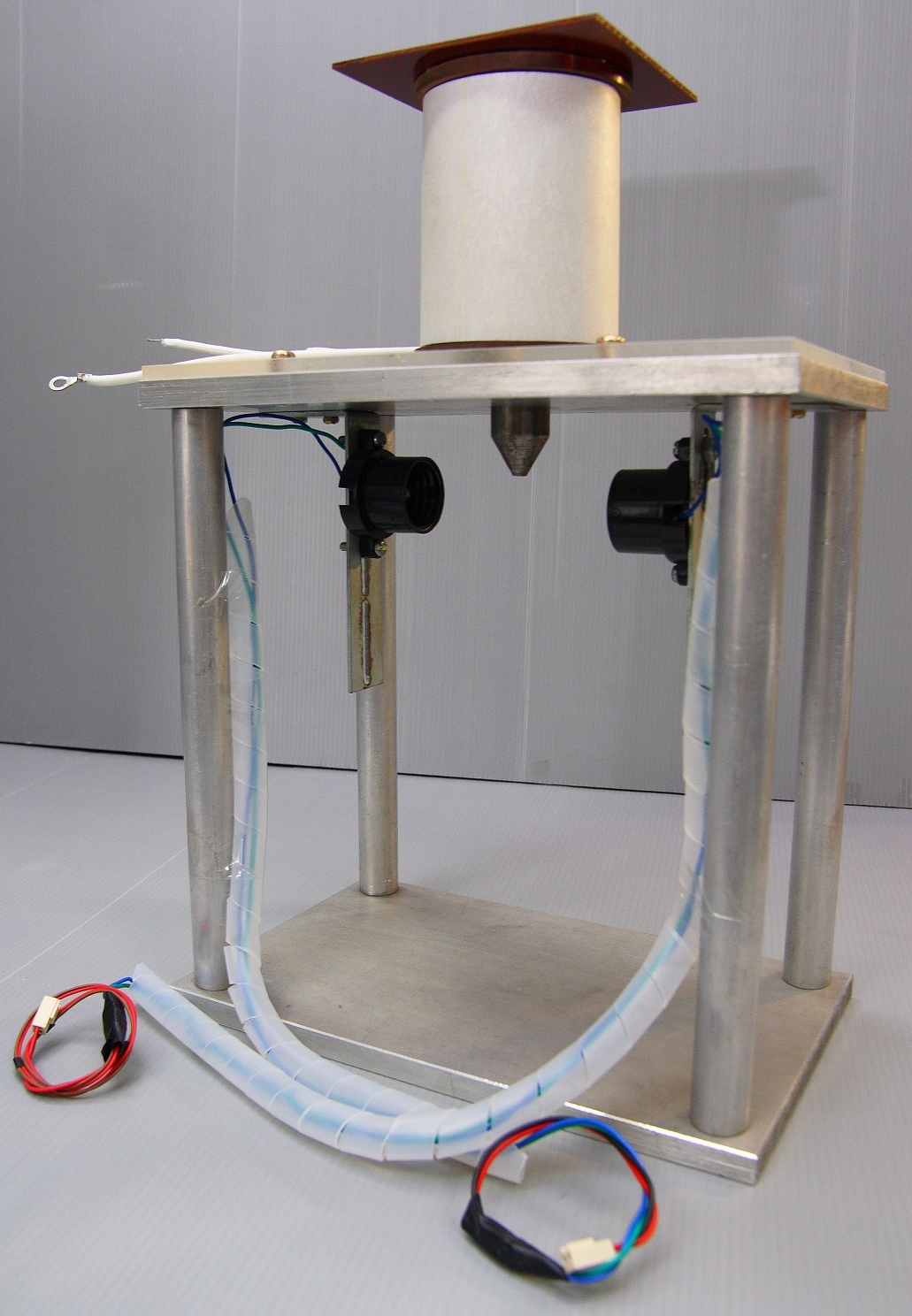
本論文旨在設計與研製一套磁浮控制系統,整體系統係由磁浮受控體、位置感測器、電流驅動器及控制器四個部份所組成。磁浮受控體由電磁鐵與鐵球所構成,經過系統建模與分析後可知其本身為一非線性且不穩定的系統。在本論文中,吾人依不同的控制理論,分別設計了相位領先控制器與順滑模態控制器來達到定位控制之目的,而定位控制乃指控制鐵球磁浮於空中並保持平衡不落下。此外在本系統中,吾人設計了位置感測器用來偵測鐵球的位置以作為系統的回授訊號;電流驅動器之功能為提供電磁鐵線圈穩定的電流,以產生磁力來平衡鐵球所受之重力。在控制器的實現方面,吾人採用德州儀器公司所生產的定點式運算之數位訊號處理器,型號為TMS320F2812,利用其快速的運算能力和豐富的運動介面以及通訊介面,進而實現效能優越的數位控制器。最後,由模擬結果及實驗結果得知順滑模態控制器的性能及強健性皆較優於相位領先控制器,由此也驗證本論文理論及實作之一致性。
| 磁浮控制系統架構圖 |
|
| 磁浮控制系統實體圖 |
|
| 影片成果展示 |
|
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|