回授線性化與順滑模態控制之球與球系統的平衡控制
Balance Control of Ball on Ball Systems Using Feedback Linearization and Sliding Mode Control
(98 劉士源)
摘要
基於架構簡單的原因,倒單擺、球與桿、倒三角等為控制實驗教育上或學術研究上常見之機電系統。上述的這些機電系統之共同特點為其皆具欠致動性,又因這些機電系統先天上為非線性且不穩定的系統,因此常被用來驗證先進的非線性控制理論的效能。回授線性化與順滑模態控制法則在非線性控制系統設計上不管於理論發展或實務應用方面,近幾年來皆受到相當高程度之重視。回授線性化的主要精神在於利用變數變換將非線性系統轉換成線性系統,然後就可以利用早已發展完善的線性系統控制理論,針對轉換過的線性系統去設計控制器以達到穩定化及特定性能之控制目的。順滑模態控制法則是利用選定一個順滑面後驅使系統的初始狀態能在有限時間內接觸到順滑面且不再脫離順滑面,並朝向平衡點的方向移動。順滑模態的好處是面對系統的非線性及不確定性能具有較好的強健性。本論文旨在建立一組嶄新的機電實驗系統架構「球與球系統」,此系統由直流馬達帶動大球滾動使小球能立在大球上達到平衡。於論文中吾人利用回授線性化與順滑模態控制法來設計使系統穩定之控制器,最後利用數位訊號處理器實現控制法則,並以實驗與模擬來驗證控制系統之性能。
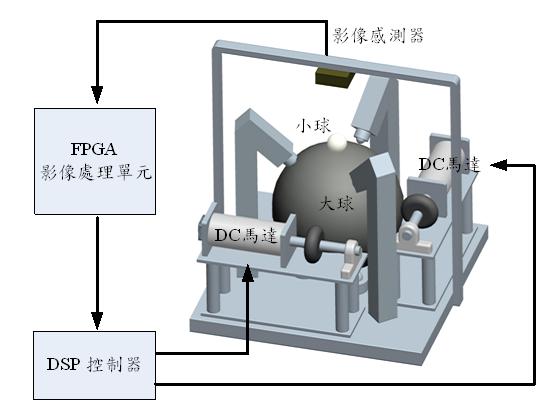
| 球與球系統之架構圖 |
|
| 球與球系統之實體圖 |
.JPG)
|
| 影片成果展示 |
|
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|