Balance Control of a Two-Wheeled Inverted Pendulum Mobile Robot
(98 洪聆剛)
摘要
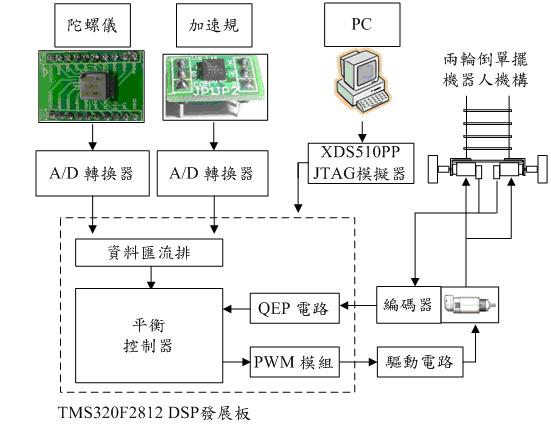
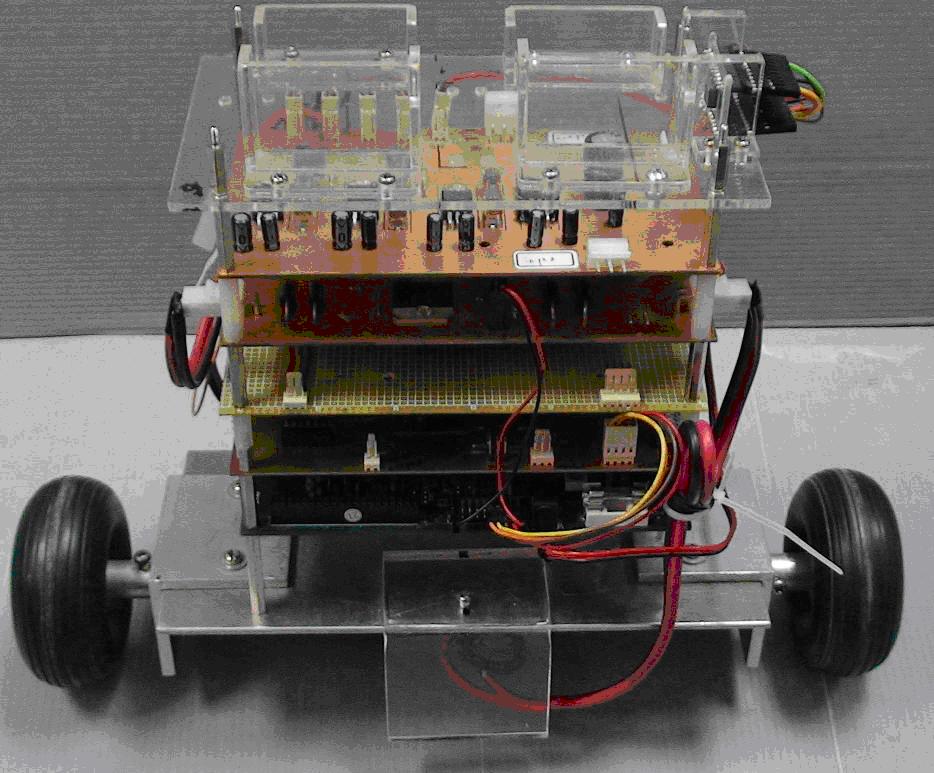
兩輪倒單擺機器人是一種特殊的輪式機器人,由於馬達裝置在兩側,所以具機動性強及體積小之優點。本論文旨在推導兩輪倒單擺機器人之動態數學模型,針對此模型利用LQR控制法則設計平衡控制器。在兩輪倒單擺機器人的姿態角度估測方面,則使用加速規和陀螺儀配合互補濾波器得到較佳的傾角訊號。控制器的實現是以數位信號處理器(digital signal processor, DSP)為基礎,使用德州儀器公司所生產之定點式數位信號處理器,型號為TMS320F2812。實作方面以C語言來實現所有控制演算法,透過DSP控制板來提供系統控制力的運算及輸出,再搭配PWM驅動電路驅動直流馬達帶動兩輪平衡機器人達到平衡控制的目的。由模擬與實驗結果顯示,所完成之控制系統可達到平衡控制之目的。