以全向移動機器人為致動器之二維倒單擺平衡控制
Balance control of a Two-Dimensional Inverted Pendulum Acuated by an Omnidirectional Mobile Robot
(99 邱萬鍾)
摘要
倒單擺系統在學術研究與控制教育實驗上為常見之機電系統,因為其機械結構簡單,同時又具有非 線性及欠致動性之特點,因此常被用來驗證許多先進的控制理論;全向移動機器人為一種特殊之輪式機 器人,具有可在平面上任意方向移動而不需改變其姿態的優點,在控制上具有較佳之機動性與靈活性。 本系統最主要是在於將舊有的倒單擺平衡控制問題結合全向移動機器人以建構二維倒單擺平衡系統。而 此系統最主要的控制目的是在於驅動全向移動機器人使得倒單擺可直立平衡於空間中而不倒下,從控制 的觀點來看,整個系統的架構具有高度非線性、欠致動性且極為不穩定,因此在平衡控制上具有極高之 挑戰性。
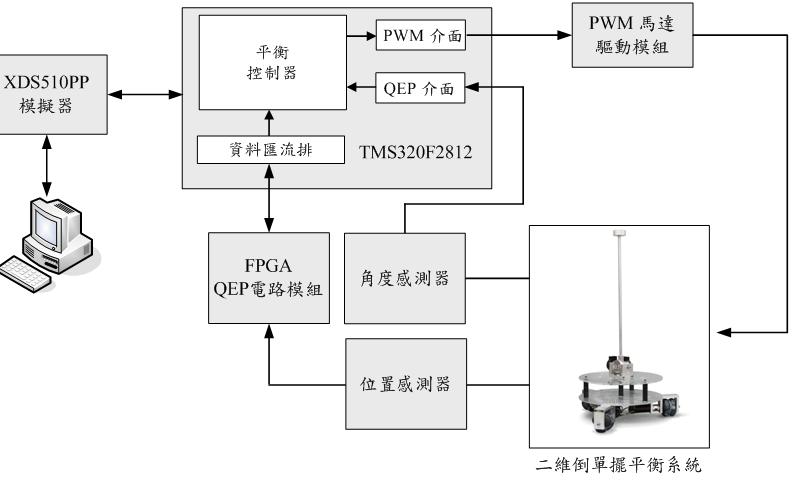
二維倒單擺系統構架圖
影片成果展示
有任何問題或建議請點
連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
.JPG)
.JPG)