- 旋轉型倒單擺系統(93級 詹富強)
摘要
旋轉型倒單擺系統為一快速、不穩定之非線性系統,故適用於驗證各種控制理論。旋轉型倒單擺是由二個不同平面的連桿所組成,其控制目的為由直流馬達驅動旋轉臂帶動單擺作甩上運動與平衡控制,本論文的平衡控制器是使用最佳控制理論來完成,甩上控制器則使用以能量為基礎之控制來完成。
並以定點式數位訊號處理器為控制核心來實現控制器,整個控制系統具可攜性且有利於系統的小型化,改善傳統使用PC-Based之控制系統所占用之較大設備空間及減低硬體實現成本,非常適合課堂上之操作和展示,作為輔助教學工具。旋轉型倒單擺系統架構圖 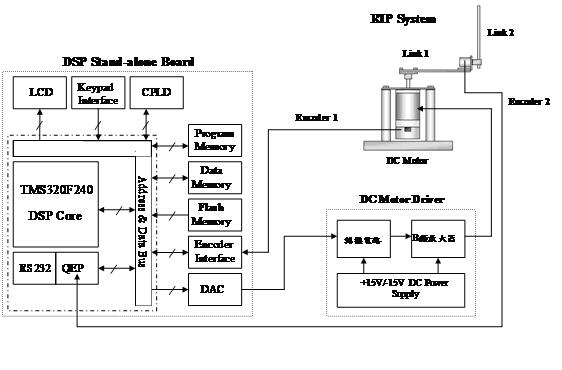
旋轉型倒單擺系統實體圖 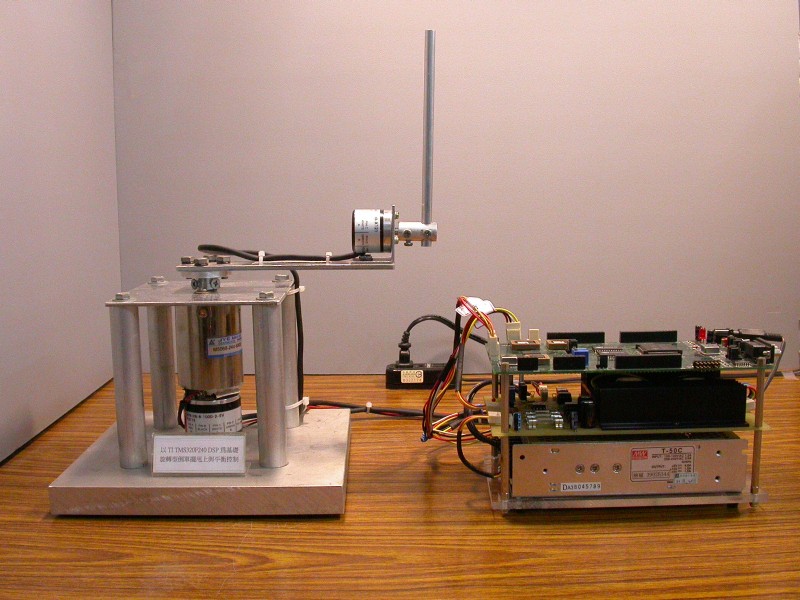
影片成果展示 - 雙連桿倒單擺系統(91級 林鈺翔)
摘要
雙連桿倒單擺系統為一不穩定系統,其機械結構並不複雜,故適用於驗證各種控制理論。雙連桿倒單擺系統是由兩個同一平面運動的連桿所組成,其控制目的為由直流伺服馬達驅動連桿一帶動連桿二作甩上運動與倒立平衡控制,這種系統和車與桿倒單擺及旋轉式倒單擺系統最大的差異在於力矩的變化,車與桿倒單擺系統及旋轉式倒單擺系統的力矩大小變化不會隨位置的變化而變動,但雙連桿倒單擺系統會隨轉動角度的大小而力矩有所變動,使得本系統在平衡控制與甩上控制更具困難。本論文的平衡控制器是使用最佳控制理論來完成、甩上控制器分別使用以能量為基礎之控制及部分回授線性化控制這兩種方法來完成。雙連桿倒單擺系統架構圖 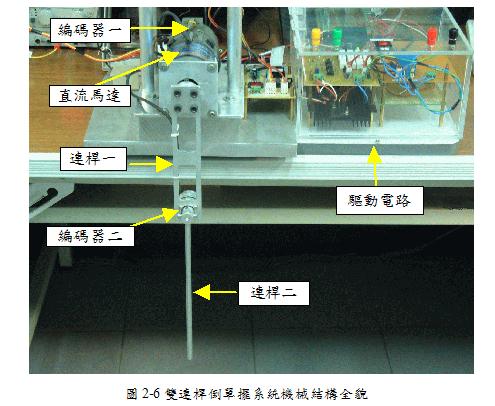
雙連桿倒單擺系統實體圖 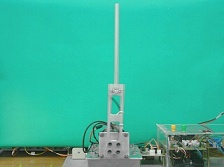
影片成果展示 - 旋轉型雙節倒單擺系統(95級 陳上澍)
摘要
旋轉型雙節倒單擺系統為一快速、不穩定之非線性系統,故適用於驗證各種控制理論。旋轉型雙節倒單擺是由二個不同平面的連桿所組成,此系統包括旋轉型雙節倒單擺機構與馬達致動器,本論文先以最小平方差系統識別方法與Euler-Lagrangian方程式分別建立出致動器部分與旋轉型雙節倒單擺機構部分之系統數學模型,並將二者合成系統受控體。其控制目的為由直流馬達驅動旋轉臂帶動單擺作甩上運動與平衡控制,本實驗的平衡控制器是使用LQR最佳控制理論來完成,甩上控制器則使用以能量為基礎之控制來完成。旋轉型雙節倒單擺系統架構圖 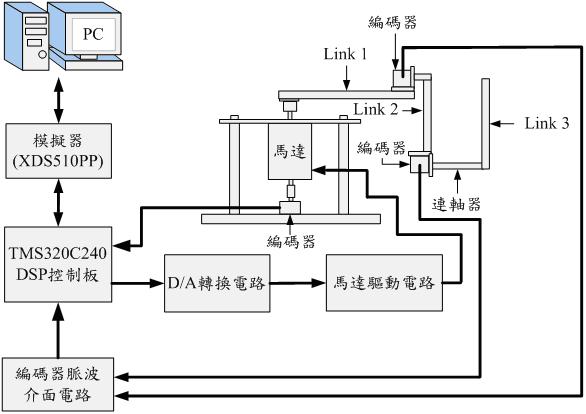
旋轉型雙節倒單擺系統實體圖 
影片成果展示 - 雙連桿倒單擺系統(95級 杜俊誼)
摘要
雙連桿倒單擺系統是由兩個同一平面運動的連桿所組成的,而本實驗主要的研究目的在於將雙連桿倒單擺甩上至不穩定的平衡點,並將其平衡於平衡點。在本論文中,平衡控制器是採用LQR控制理論,甩上控制器則分別以部份回授線性化(partial feedback linearization)法與能量方法(energy-based)為基礎分別設計。透過TMS320F2812 DSP控制板來提供系統控制力的運算及輸出,再搭配D/A轉換電路以及馬達驅動電路,來驅動直流馬達帶動雙連桿倒單擺完成甩上及平衡的控制動作。本實驗有別於傳統雙連桿倒單擺系統,所採用的有線傳輸的方式傳送未致動連桿的位置資訊,而改採用無線傳輸的方式傳送,以解決傳輸線干擾系統動態的問題。雙連桿倒單擺系統架構圖 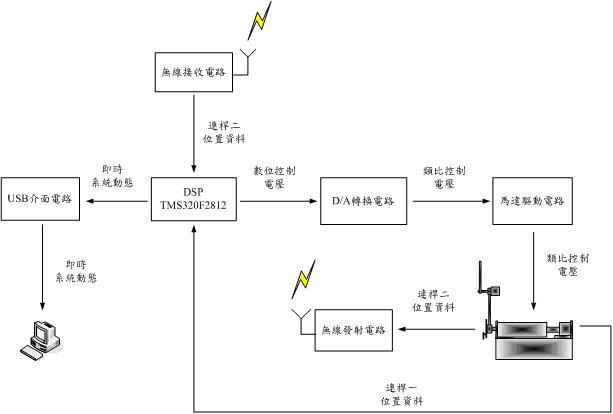
雙連桿倒單擺系統實體圖 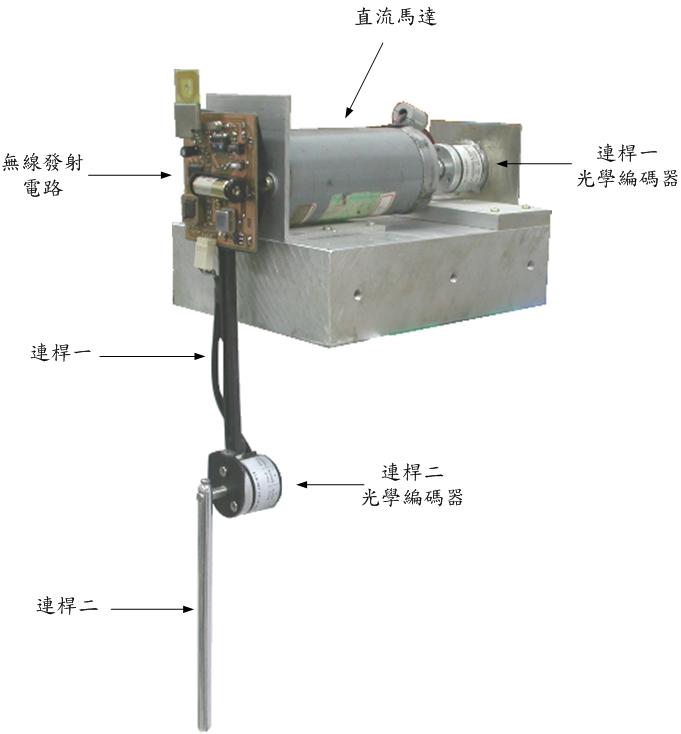
影片成果展示
|
有任何問題或建議請點連絡我們
|