- 手眼協調(94級 楊志偉)
『2005自動控制研討會學生實作論文競賽』優等獎
『2006德州儀器亞洲區DSP應用競賽台灣區分區競賽』佳作獎
摘要
手眼協調(hand-eye coordination)能力為人類所具有的一項高等生物行為動作。而在人型機器人系統上,為達到模仿人類行為動作,手眼協調功能之建立為一重要的研究課題,其常需利用視覺伺服為基礎來完成。本論文旨在研究以視覺伺服為基礎,以倒單擺系統為一平台,結合CMOS (Complementary Metal-Oxide Semiconductor) 影像感測器來模擬一手眼協調控制系統。整個系統主要分為機械結構、馬達致動器、影像處理模組、靜態隨機存取記憶體(Static Random Access Memory, SRAM)、影像感測器和平衡控制器部分。其中,影像處理模組部份主要是以Altera公司所生產的可程式邏輯閘陣列(Field Programmable Gate Array, FPGA)來完成;影像感測器則是採用國家半導體公司(National Semiconductor)所生產的CMOS影像感測器;而 平衡控制器部分是以德州儀器(Texas Instruments, TI)生產的數位訊號處理器(Digital SignalProcessor, DSP) TMS320F240為控制核心。旋轉型倒單擺系統為一快速、不穩定之非線性系統,由兩個不同平面的連桿所組成,其控制目的為由直流馬達驅動旋轉臂帶動單擺作平衡控制。在本論文中,量測單擺偏擺角度則是以影像感測器來取代以往所用的光學式編碼器來作為位置感測元件。其方法首先,利用CMOS影像感測器來擷取單擺的偏擺位置。之後,將擷取到的影像資料存入至外掛的記憶體中,再由FPGA將記憶體內的影像資料讀出並做相關的影像演算法處理。最後,將由FPGA所計算出的單擺偏擺位置資訊送入由數位訊號處理器為核心所構成的LQR平衡控制器中,此平衡控制器則依據單擺所偏擺的角度來完成單擺的平衡。經過驗證與分析後,本研究證實在以視覺伺服為基礎下可完成旋轉型倒單擺的平衡控制。視覺伺服旋轉型倒單擺架構圖 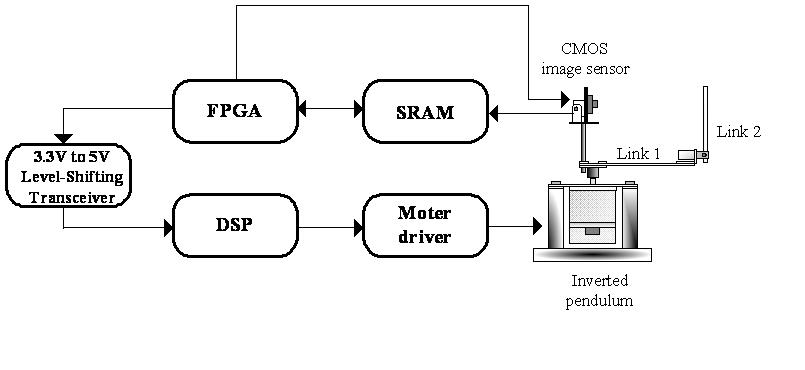
視覺伺服旋轉型倒單擺實體圖 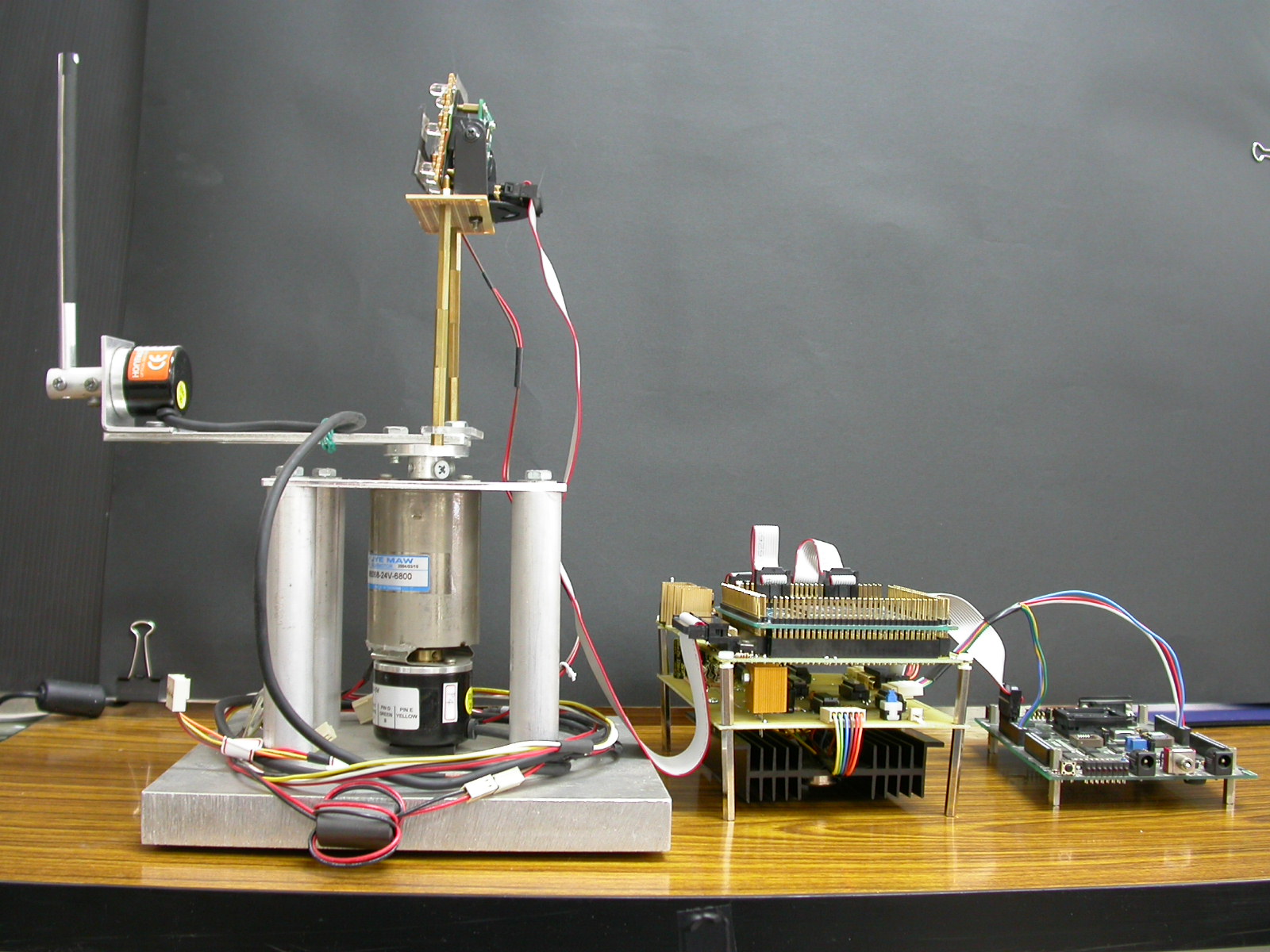
影片成果展示 - 模擬人類的雙眼(2D)(95級 林家民)
摘要
本實驗的主要目的是研究以視覺伺服為基礎之物體追蹤系統,系統是以兩個影像感測器來模擬人類的雙眼,如此便能計算出目標物在空間中的位置,並以機電系統帶動一雷射瞄準器,使其指向目標物所在位置,藉此證明追蹤之效果。整個系統主要分為機械結構、馬達致動器、影像處理模組、影像感測器和馬達位置控制器。其中,影像處理模組與馬達位置控制器是以德州儀器(Texas Instruments, TI)所生產的數位訊號處理器(digital signal processor, DSP) TMS320C6416為核心來實現;影像感測器是採用原相科技(PixArt Technologies)所生產的CMOS黑白影像感測器PAS109B。在偵測移動物體的方法中,本論文採用廣受歡迎的運動能量法(motion energy methods),然而這個方法容易因為攝影機的震動或是背景亮度的改變而產生誤差,為了解決這個問題,本實驗嘗試以訊息理論中的最大熵定理(maximum entropy theorem),找出適當的臨界值,利用此一臨界值消除背景亮度改變所造成的影響。經過分析及驗證後,證實了演算法的可行性,並完成了以視覺伺服為基礎之物體追蹤系統。視覺伺服物體追蹤系統架構圖 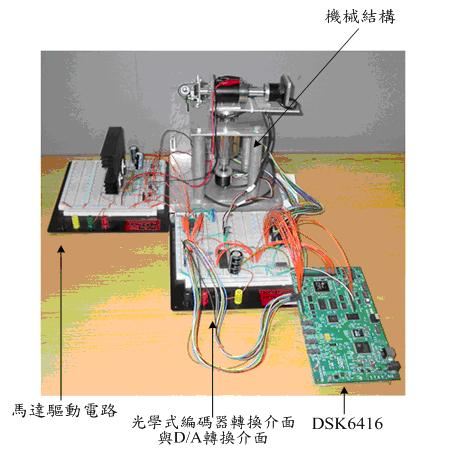
視覺伺服物體追蹤系統實體圖 
影片成果展示 - 以視覺伺服為基礎之舉球控制系統之研製(97級 張居強)
摘要
本論文採用數位訊號處理器(digital signal processor, DSP)及可程式邏輯閘陣列(field programmable gate array, FPGA)為平台,建構出乒乓球在三維空間中的軌跡追蹤與舉球視覺伺服控制系統。整個系統主要可分為舉球機構、影像處理模組、影像感測器、數位訊號處理器與舉球控制系統。其中,影像處理模組以可程式邏輯閘陣列來完成;影像感測器則是採用CMOS黑白影像感測器;而追蹤控制器部份是以數位訊號處理器為控制核心。在實作上,首先利用CMOS影像感測器擷取影像,經由FPGA進行影像演算法求得乒乓球在影像平面中的座標並透過DSP計算出乒乓球在三維空間中的軌跡,使用軌跡決定擊球時間、擊球速度與擊球平板的旋轉角度,最後透過PID控制器進行馬達控制。經過驗證與分析後,本論文證實了演算法的可行性,並完成了以視覺伺服為基礎之舉球控制系統。舉球控制系統之架構圖 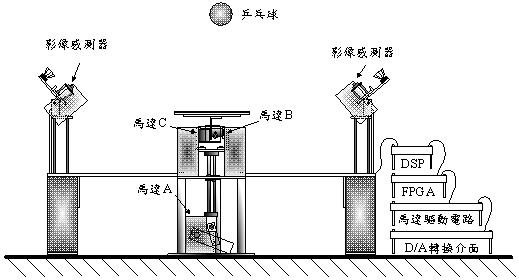
舉球控制系統之實體圖 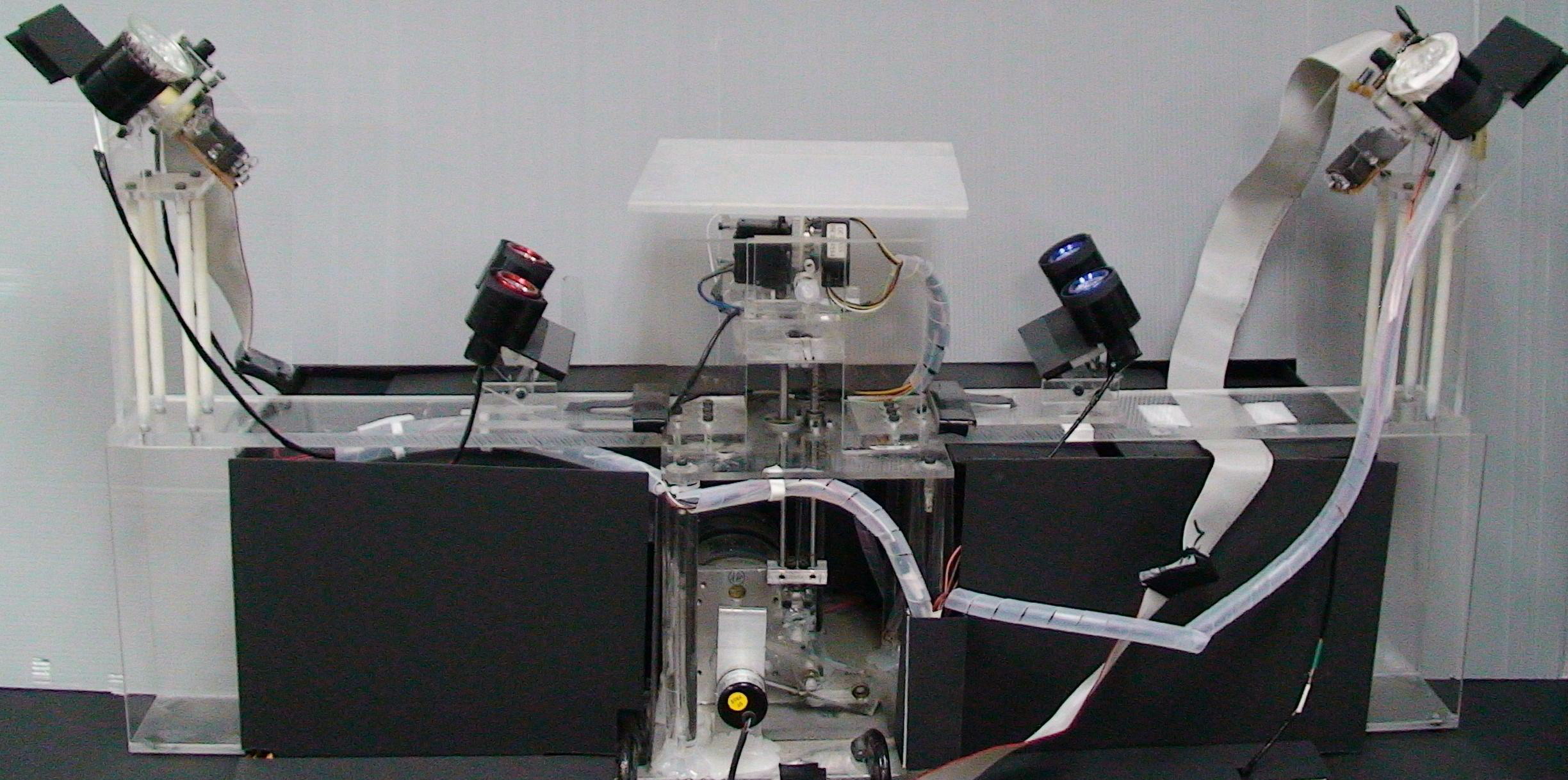
影片成果展示 - 以視覺為基礎之複雜背景下物體追蹤控制系統之設計與實現(98級 蔡任右)
摘要
本論文的主要目的是研究以視覺為基礎,建構出複雜背景下物體追蹤控制系統。其中利用視覺來感測出目標物在空間中的位置,並控制馬達來追蹤目標物。整個系統主要分為影像處理模組、影像感測器和追蹤控制器部份,其中,影像處理模組部份主要是以可程式邏輯閘陣列(field programmable gate array, FPGA)來完成;影像感測器則是採用CMOS黑白影像感測器;而追蹤控制器部份是以數位訊號處理器為控制核心。在移動物體偵測的方法上,本論文採用了連通物件標記法(connected component labeling)及面積濾波(size filter),而這兩種方法應用上容易因影像雜訊太多而產生誤差,為了解決這個問題,本論文嘗試以中值濾波器(median filter)與形態學濾波器(morphological filter)來抑制影像雜訊之影響。經過分析及驗證後,本論文證實了演算法的可行性。複雜背景下物體追蹤控制系統之架構圖 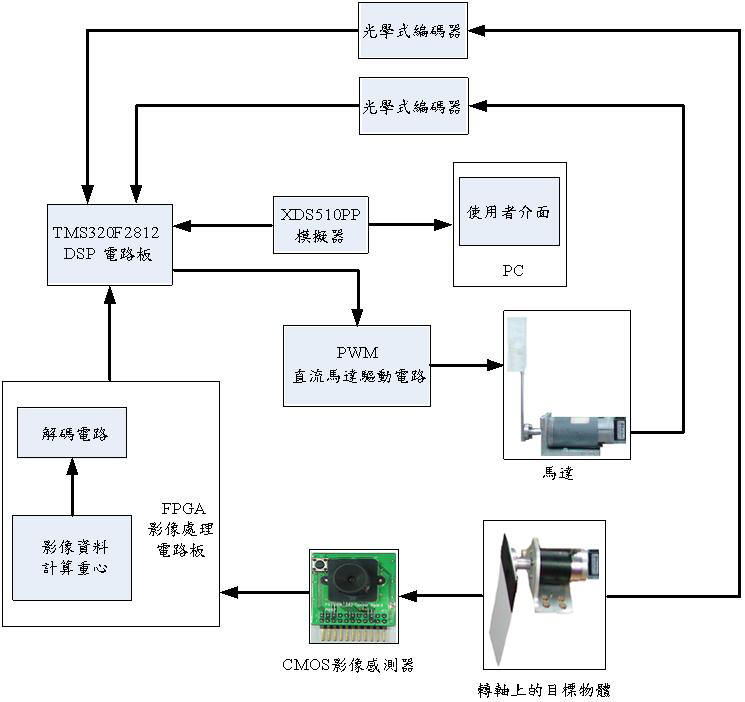
複雜背景下物體追蹤控制系統之實體圖 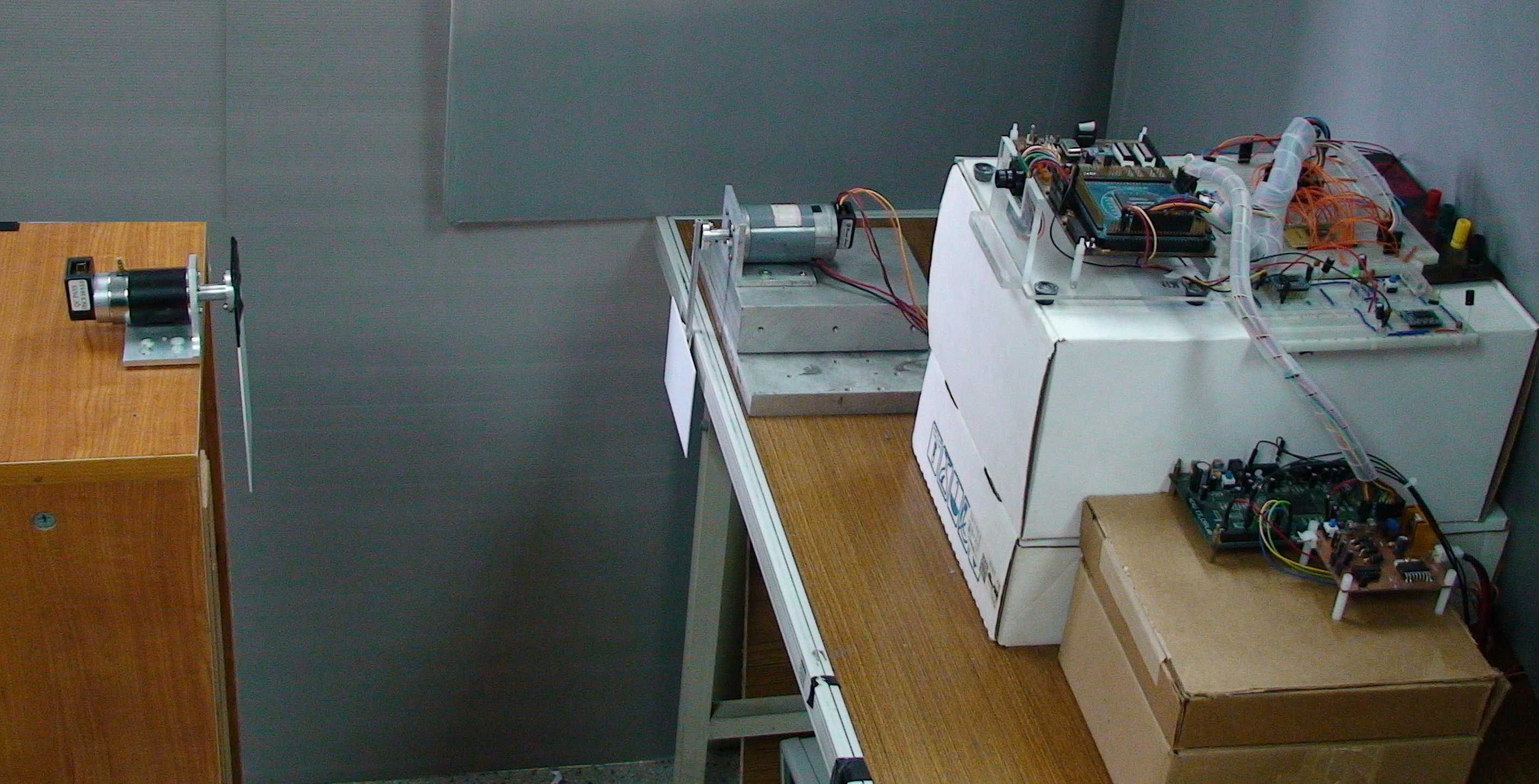
影片成果展示
|
有任何問題或建議請點連絡我們
|