- 3D視覺導航(96級 徐嘉明)
摘要
本實驗是以數位訊號處理器(digital signal processor, DSP)為平台,以影像處理方法為基礎,建構出即時影像追蹤系統並結合全向移動機器人以達成軌跡追蹤控制之目的。整個系統主要分成全向移動機器人、影像處理模組、無線傳輸模組、影像感測器和追蹤控制器部份。其中,影像處理模組部份主要是以Altera公司所生產的可程式邏輯閘陣列(field programmable gate array, FPGA)來完成;影像感測器則是採用原相科技(PixArt Technologies)所生產的CMOS黑白影像感測器PAS106BBB;而追蹤控制器部份是以德州儀器(Texas Instruments, TI)生產的數位訊號處理器TMS320F2812為控制核心。在實作上,利用CMOS影像感測器來擷取全向移動機器人的位置,再由FPGA處理相關的影像演算法,透過無線傳輸的方式傳送位置資訊給全向移動機器人,最後利用計算轉矩(computed torque)與PID追蹤控制器來完成全向移動機器人的追蹤控制。經過驗證與分析後,本實驗證實了演算法的可行性,並完成了以視覺為基礎之全向移動機器人追蹤控制。視覺伺服系統架構圖 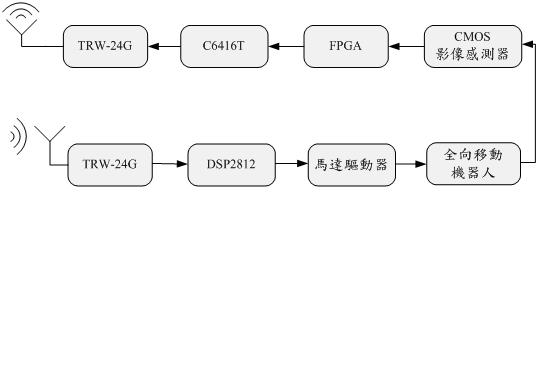
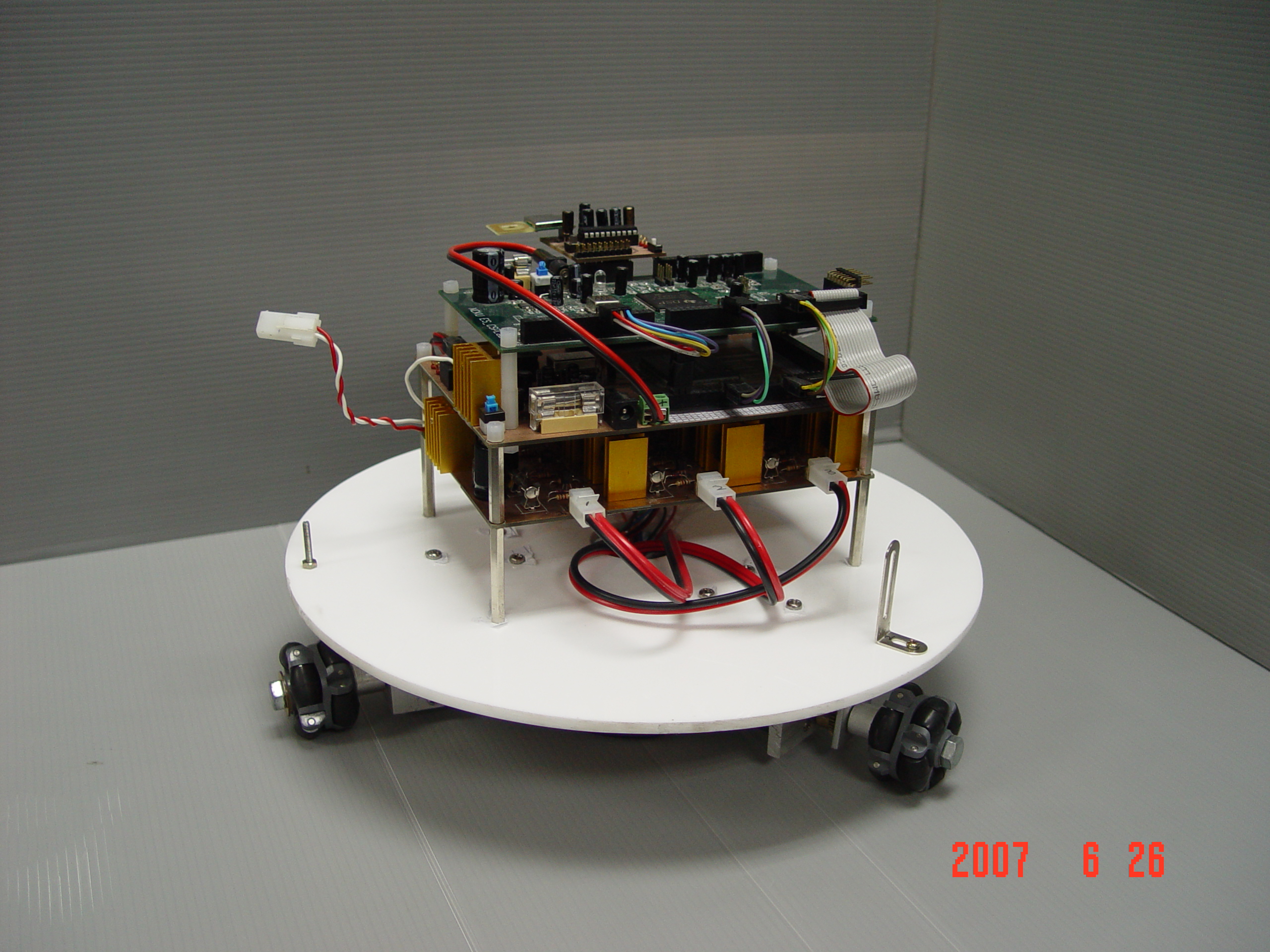
視覺伺服系統實體圖 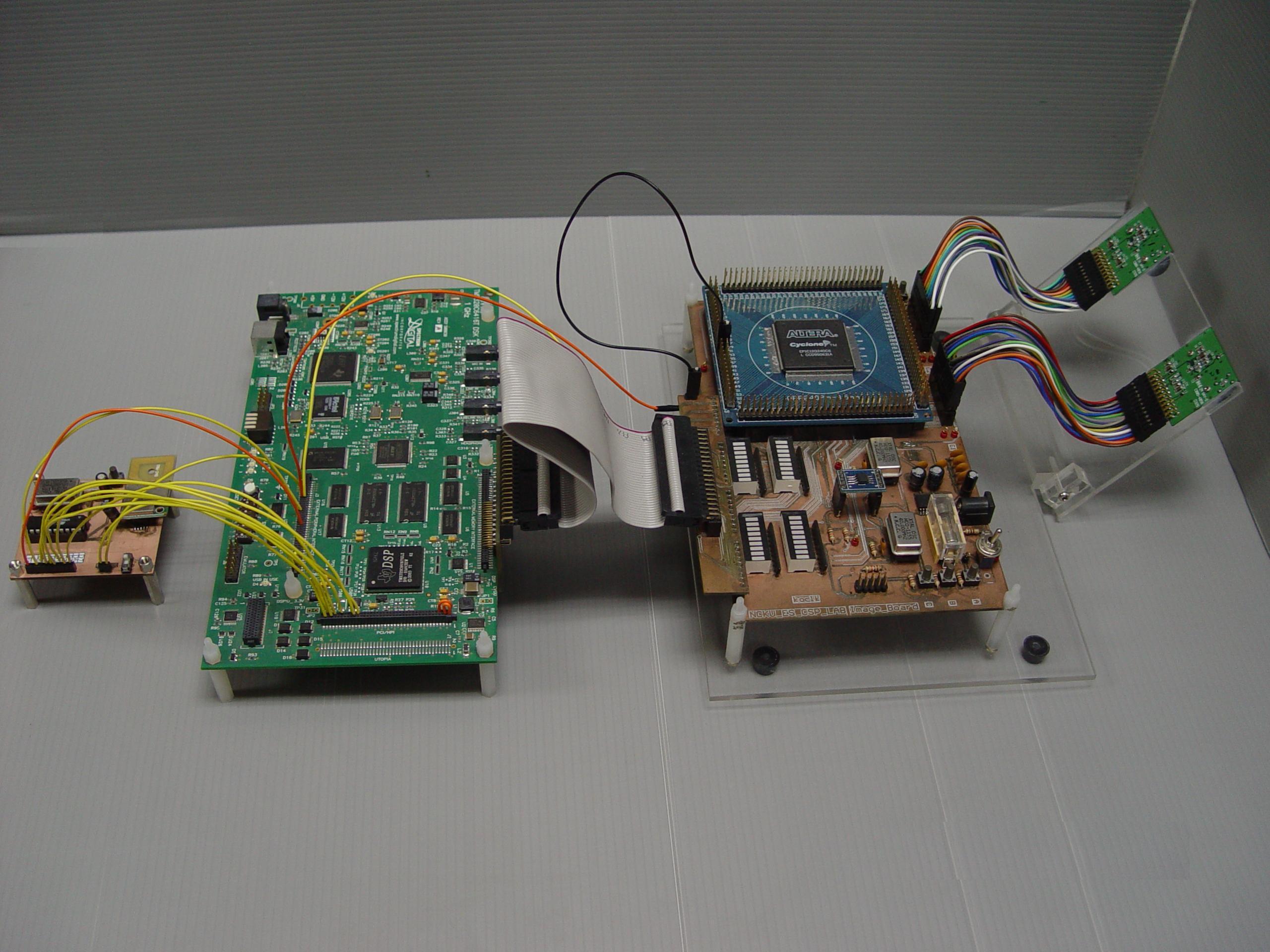
影片成果展示 - 即時物體追蹤之立體視覺導引全向移動機器人之研製(98級 顏忠逸)
摘要
本論文旨在設計並實現視覺伺服系統,以立體視覺即時導引全向移動機器人達成物體追蹤,因此利用兩個影像感測器來模擬人類的雙眼,如此便能計算出目標物在空間中的位置,並以影像處理演算法,建構出即時影像追蹤並結合引導全向移動機器人以達成追蹤控制目的。整個系統主要分成全向移動機器人、影像處理模組、兩顆影像感測器和追蹤控制器部份。其中,影像處理模組部份主要是以可程式邏輯閘陣列(field programmable gate array, FPGA)來完成;影像感測器則是採用CMOS影像感測器;而追蹤控制器部份是以數位訊號處理器為控制核心。在實作上,利用CMOS影像感測器來擷取物體位置,再由FPGA處理相關的影像演算法,並將資訊傳到數位訊號處理器去估測物體在三維空間中的座標,最後分別利用凝視角度增加法(gaining angle of gaze)結合PI控制器與計算轉矩(computed torque)結合PID控制器兩種控制方法來完成引導全向移動機器人的追蹤控制。本論文比較兩種演算法的性能,經過分析與實驗後,以利用計算轉矩結合PID控制器具有較佳之性能。立體視覺導引全向移動機器人之架構圖 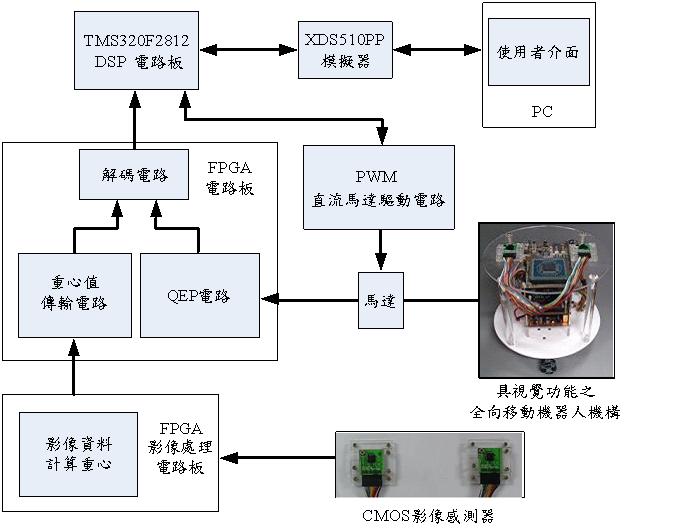
立體視覺導引全向移動機器人之實體圖 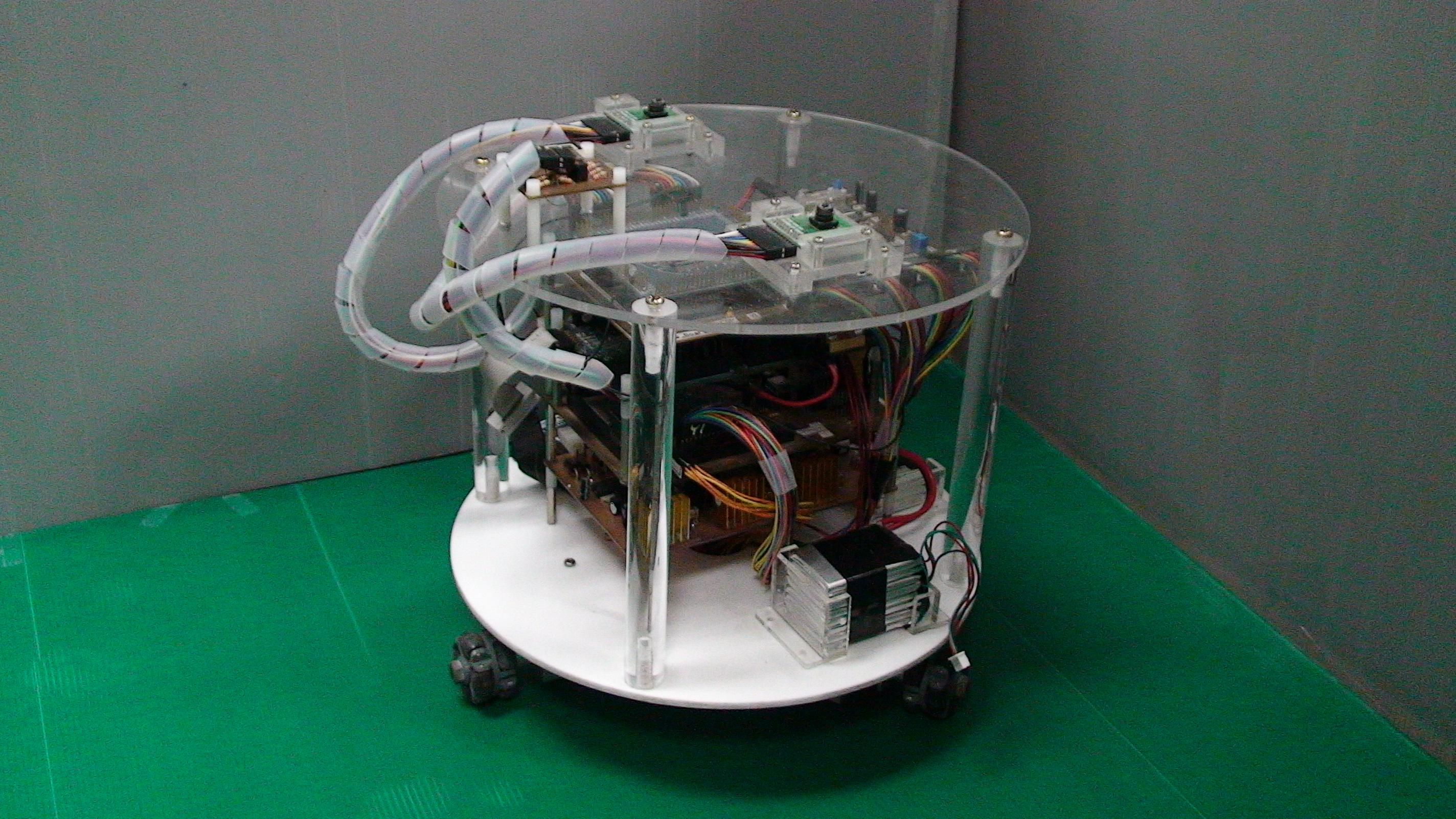
影片成果展示
|
有任何問題或建議請點連絡我們
|