- 支點在中央(91級 王興森)
摘要
本實驗以球桿系統為例探討控制上調節問題(regulation problem),由於球桿系統存在離心力項,所以系統的相對階數(relative degree)沒有被適當的定義(not well defined)。然而此項提供強烈的正回授量,容易使系統產生跳動現象而呈現不穩定,若桿子角度控制不妥時,容易使球突然飛出而脫離桿上的滑軌,此時會得到不正確的球位置回授訊號,因而產生錯誤的回授控制。其中控制法則使用倒階(backstepping)控制方法,其為遞迴程序重複選擇Lyapunov function的一種回授控制設計,且能在很少限制條件下時常解決穩定性、追蹤和強健控制上的問題。在系統控制器設計中利用高增益的控制參數,使離心力項在閉迴路的影響被衰減,且系統達到全域漸進穩定(GAS)。球與桿系統實體圖 
影片成果展示 - 支點在端點(93級 黃聖財)
『2005自動控制研討會學生實作論文競賽』優等獎
摘要
球與桿系統是一個高度非線性系統,由於系統存在有離心力項,所以相對階數(relative degree)沒有被適當的定義(not well defined),在控制上造成相當高的難度。本論文中,首先介紹如何建立此系統之機構,然後推導出系統之數學模型,再使用倒階(backstepping)控制方法來設計控制器,其為利用遞迴程序重複選用Lyapunov function來判斷穩定性的一種回授控制設計方法,能在限制條件下解決穩定性(stabilization)、追蹤(tracking)和強健(robust)控制上的問題。所得之倒階控制器,可以減小離心力項對系統的影響,使系統達到全域漸進穩定(global asymptotic stability)最後,以數位訊號處理器為基礎來實現整個控制系統,使球在桿子上達到平衡與追蹤控制。球與桿系統架構圖 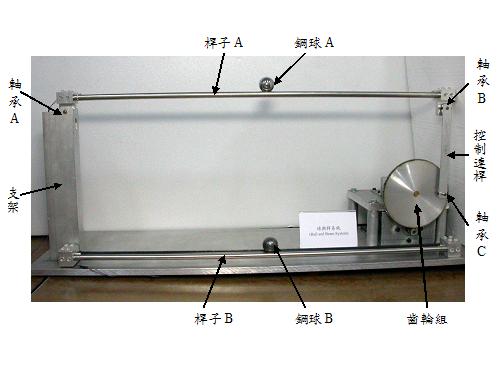
球與桿系統實體圖 
影片成果展示
|
有任何問題或建議請點連絡我們
|