- 慣性輪單擺系統(93級 凌朝雄)
摘要
慣性輪單擺系統(inertia wheel pendulum system)是一個不穩定的非線性系統,其機械結構並不複雜,故適用於驗證各種控制理論。本 實驗中首先介紹如何建立慣性輪單擺系統。本系統主要包括了電樞控制直流馬達(armature controlled DC motor)、輪盤、單擺、感測器則使用光學式旋轉型編碼器。然後推導出慣性輪單擺系統機械部份數學模型,並且建立直流馬達模型,利用識別方法求出馬達參數,最後並將機械部份與電氣部份合一。控制目的為由直流馬達驅動輪盤帶動單擺做甩上運動與倒立平衡控制,在平衡控制的設計我們考慮兩個方法,一個是先在平衡點處作線性化再利用極點配置法,一個是全域的非線性回授線性化。在甩上的問題我們討論以能量為基礎之部分回授線性化,控制器透過運動控制軸卡來實現。慣性輪單擺系統架構圖 
慣性輪單擺系統實體圖 
影片成果展示 - 慣性桿倒單擺系統(95級 簡立杰)
摘要
慣性桿倒單擺系統是一個不穩定的非線性系統,其機械結構並不複雜,故適用於驗證各種控制理論。本實驗中首先介紹如何建立慣性桿倒單擺系統,然後推導出慣性桿倒單擺系統機械部份數學模型,並且建立直流馬達模型,最後並將機械部份與電氣部份合一。
本實驗主要目的在使單擺平衡於不穩定平衡點,平衡控制器採用LQR控制理論,以數位訊號處理器為基礎來實現整個控制系統。慣性桿倒單擺系統架構圖 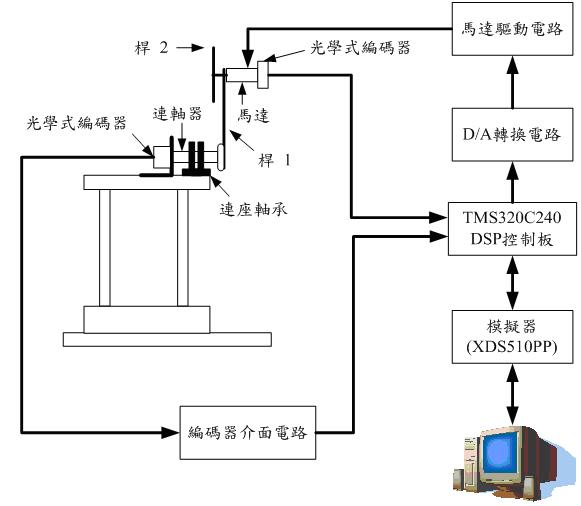
慣性桿倒單擺系統實體圖 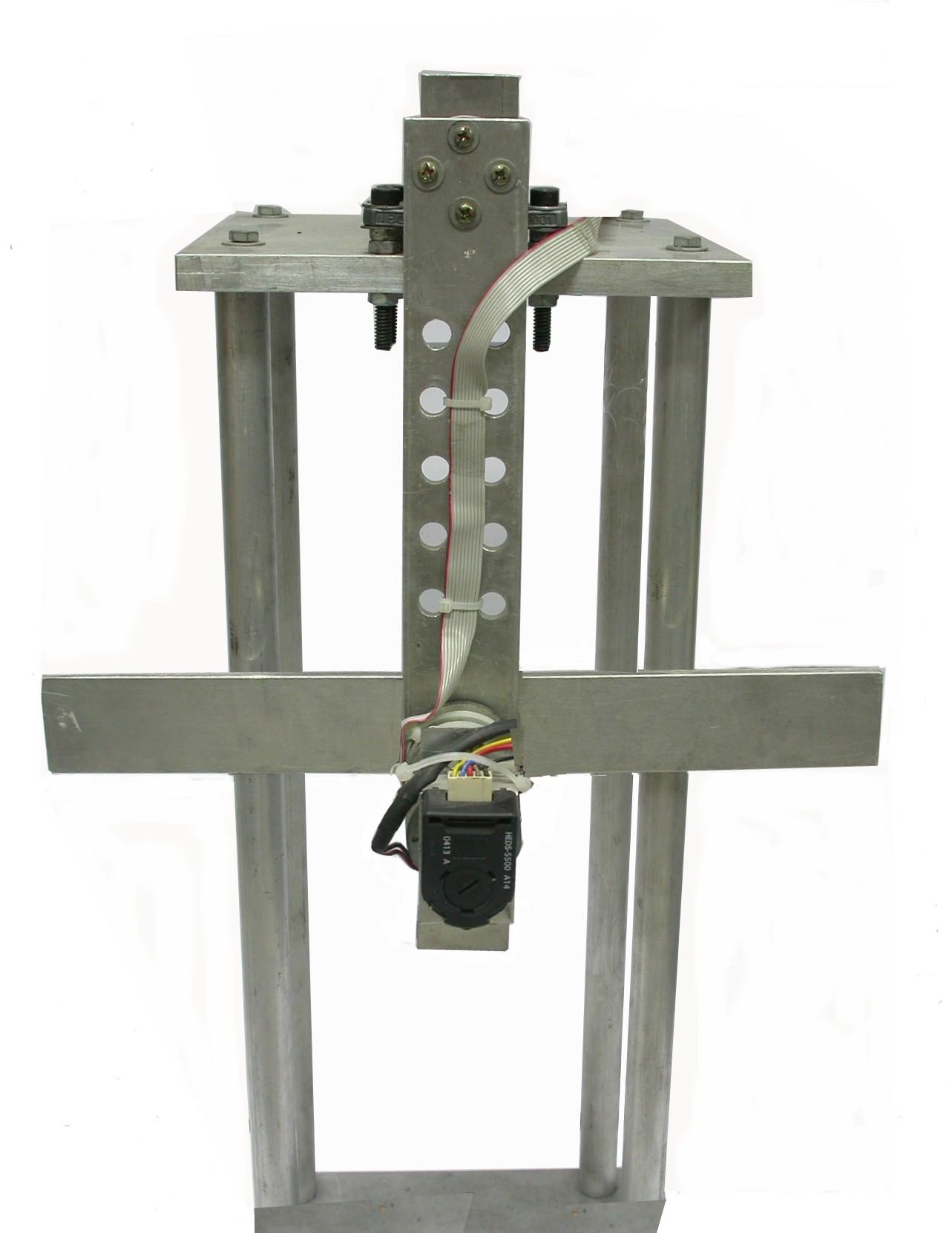
影片成果展示
|
有任何問題或建議請點連絡我們
|