- 利用倒階設計方法於球與板系統的追蹤平衡控制(95級 廖顯慶)
摘要
於本實驗中,製作了一套以數位訊號處理器(Digital Signal Processor, DSP)為基礎之球與板系統。整體系統架構包含了機械結構、馬達致動器、感測器、控制器部份,以及配合設計週邊介面電路與軟體結合而完成。球與板系統是一個高度非線性系統,由於系統存在離心力項,所以相對階數(relative degree)沒有被適當的定義。然而此項提供強烈的正回授量,易使系統產生跳動而呈現不穩定狀態,造成系統控制上的困難。在實驗中,建立系統之數學模型與架設機械結構,並使用倒階(back stepping)控制方法設計控制器,其為利用遞迴程序重複選用Lyapunov function來判定穩定性的一種回授控制方法,能在限制的條件下解決穩定性(stabilization)、追蹤(tracking)以及強健性(robustness)的問題。其所設計出的倒階控制器,可減少離心力項對系統的影響,並可使系統達到全域漸進穩定(global asymptotic stability) 。球與板系統架構圖 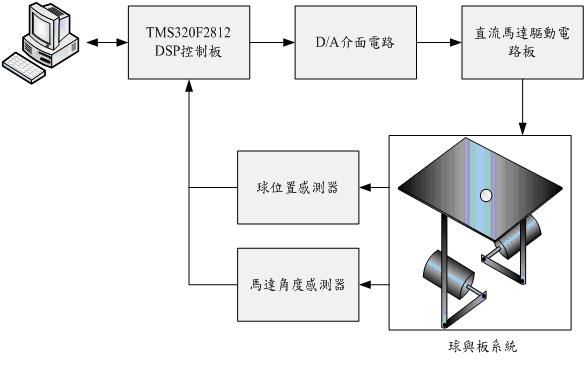
球與板系統機構圖 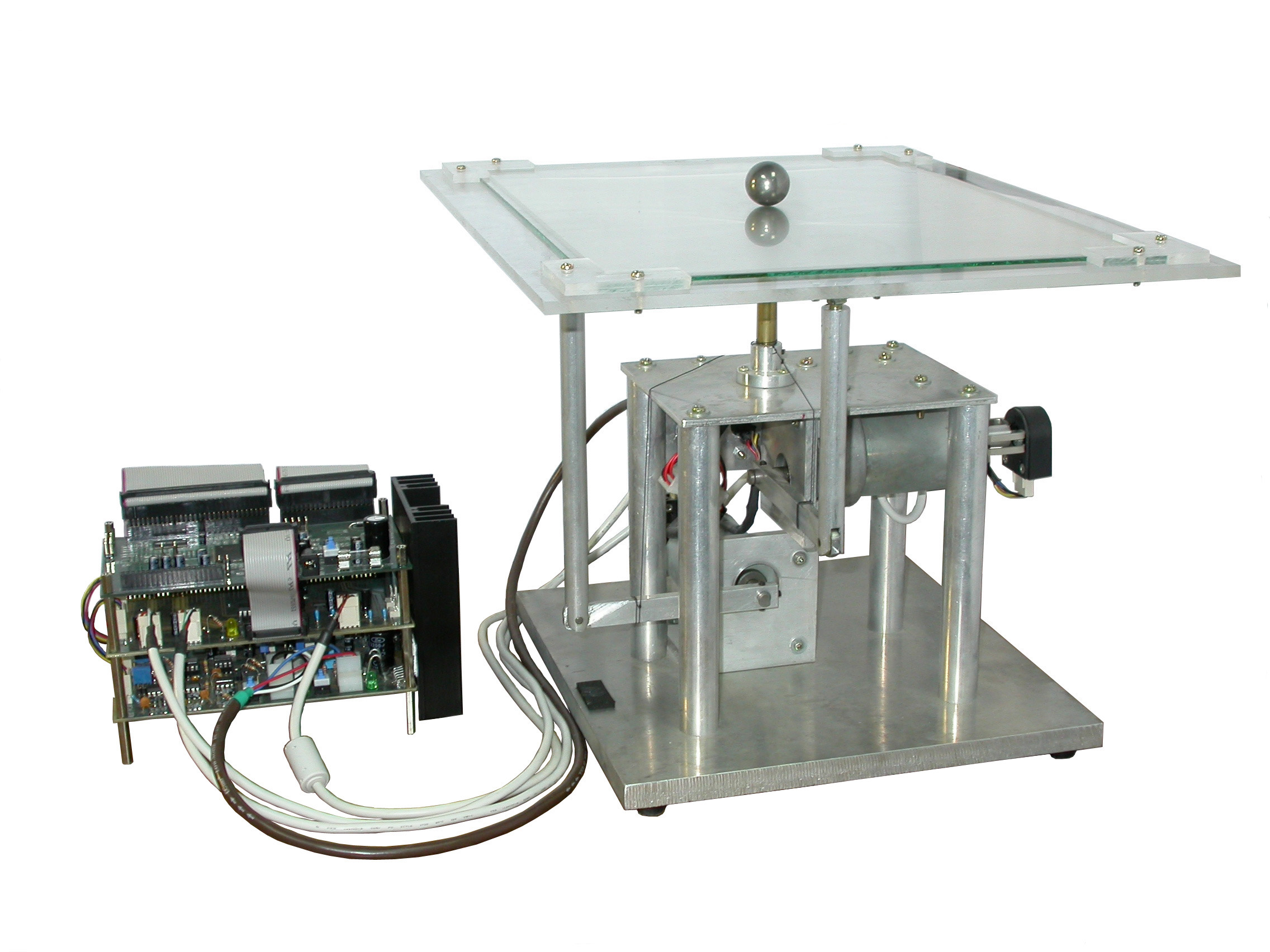
影片成果展示 - 以視覺伺服為基礎之球與板系統追蹤平衡控制(97 朱立銘)
Visual Servo Based Tracking and Balance Control of the Ball and Plate Systems摘要
本實驗中,以視覺伺服(visual servo)的觀念, 結合數位訊號處理器(Digital Signal Processor, DSP)的基礎,完成了一套視覺伺服球與板控制系統。整體系統架構包含了機械結構、馬達致動器、影像感測器、控制器部份,以及配合自行設計的週邊介面電路與軟體程式。球與板系統是一個高度非線性的系統,由於系統存在有離心力項,相對階數(relative degreee)沒有被適當定義(not well defined),使系統易跳動而不穩定。本論文先使用解耦合的方式將系統解耦合成兩個獨立的球與桿系統,再利用倒階(backstepping)控制方法與近似回授線性化(approximate feedback linearization)控制方法設計控制器。倒階控制為利用遞迴程序重複選用Lyapunov function來判斷穩定性的一種回授控制設計方法;近似回授線性化為利用李氏微分(Lie derivative)進行狀態變換,將一些非線性項視為極小的擾動,進而捨棄之,將原非線性的系統轉換近似成線性的輸入-輸出系統(approximate input-output system)。由模擬與實驗結果得知,近似回授線性化控制器與倒階控制器性能相仿,但近似回授線性化之控制法則的複雜度較低,使得控制器進行參數調整時更能觀察出各個控制參數的特性,增加控制器在實作上的可行性與便利性。而兩者皆可在限制的條件下解決穩定化(stabilization)、追蹤(tracking)以及強健性(robustness)的問題,減少離心力項對系統的影響,使系統達到漸近穩定。球與板系統架構圖 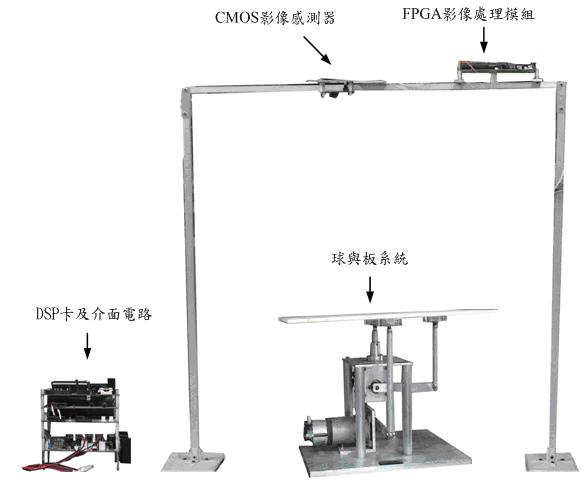
球與板系統機構圖 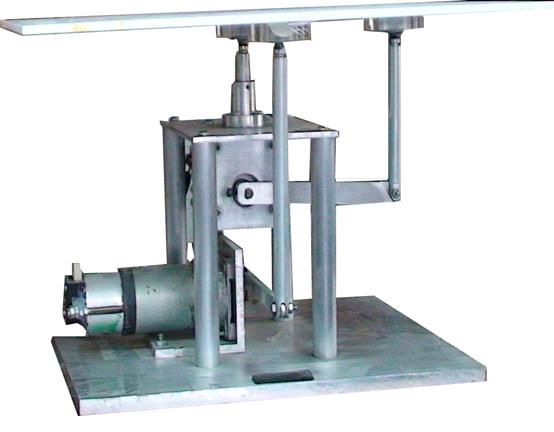
視覺球與板系統實體圖 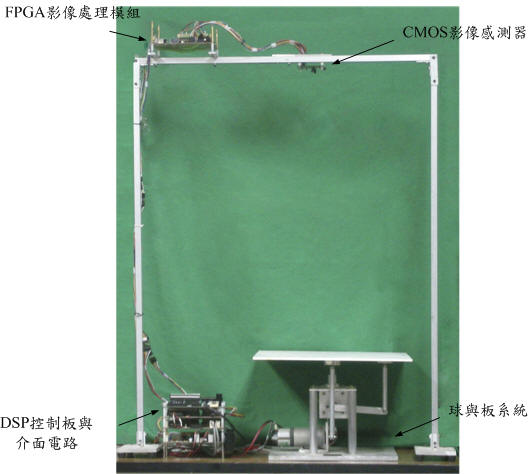
影片成果展示
|
有任何問題或建議請點連絡我們
|