控制力矩陀螺儀致動雙足機器人之步行運動控制
(Walking Motion Control of a Bipedal Robot with Control Moment Gyroscopes)
(111級 林家葦)
摘要
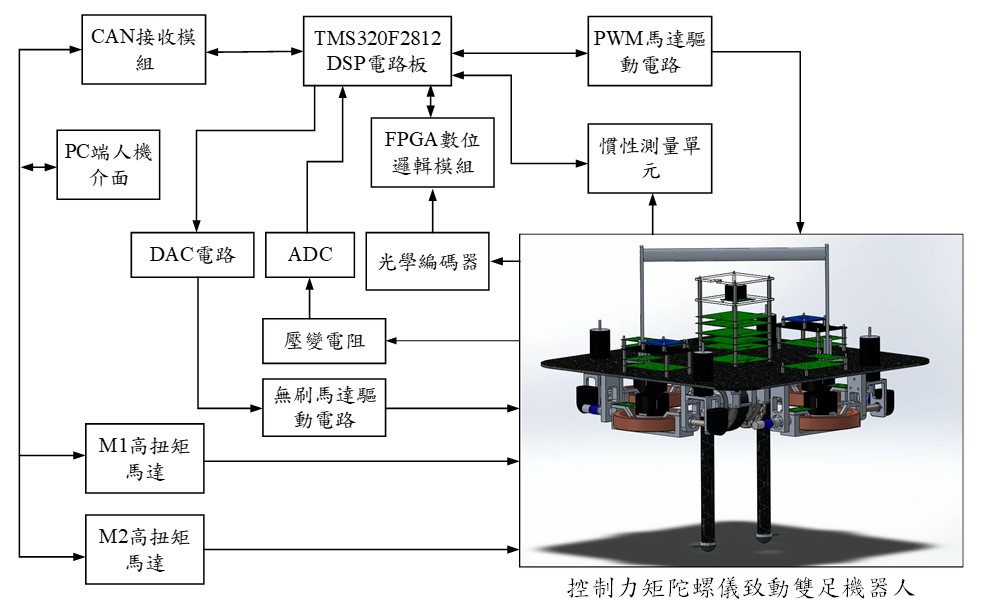
本論文旨在結合控制力矩陀螺儀與三連桿雙足機器人建構一個步行運動系統。步行運動包含了雙足機器人跨步時的擺相(swing phase)階段以及雙足觸地時的碰撞(impact)階段,上述跨步行走構成一個混合系統(hybrid system)。論文中採用Euler-Lagrange的方法,建立擺相模型與碰撞模型的動態,再以虛擬約束(virtual constrain)擬合致動角軌跡,並分析擬合軌跡於週期性步行運動的穩定性。在此使用MATLAB的最佳化函式Fmincon來求解週期性步行運動的虛擬約束,並以龐加萊映射(Poincaré map)分析其週期性步行運動的穩定性。實作的部分,以光學編碼器量測控制力矩陀螺儀翻轉角度以及雙足關節角度;以慣性量測單元(inertial measurement unit, IMU)來量測系統姿態,最後以數位信號處理器做為核心,實現用於步行運動的控制器。本論文以實務驗證及探討平衡控制與步行運動整合實現於所建構之雙足機器人的可行性。
| 系統架構圖 |
 |
影片成果展示 |
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|