陀螺效應單輪機器人之平衡與路徑追蹤控制
(Balance and Tracking Control of a Unicycle Robot with Control Moment Gyroscopes)
(111級 陳品源)
摘要
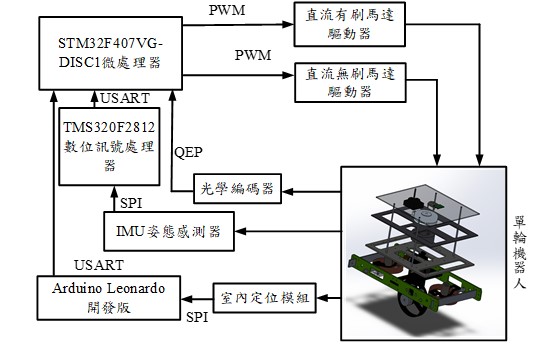
本論文旨在研究以陀螺效應單輪機器人系統並搭載轉向飛輪使其能夠達到平衡與路徑追蹤之控制目的,並且設計一特殊輪框用於改善在轉向時因與地面之摩擦力過大的問題。首先,吾人以Euler-Lagrange的方法建立三維空間中單輪機器人之數學動態模型,再將此系統模型線性化後,使用LQR方法設計平衡控制器,並依據此動態模型設計路徑追蹤控制系統,再於MATLAB/Simulink中建構平衡與路徑追蹤控制系統模型進行模擬,評估系統的強健性及可行性,最後以實作佐證。本論文以光學編碼器量測車輪及陀螺翻轉角度,以加速規、陀螺儀及電子羅盤等慣性量測單元(inertial measurement units)來偵測系統姿態,再利用室內定位模組來取得系統之即時位置資訊,最後以STM32F407微處理器與TMS320F2812數位訊號處理器實現單輪機器人平衡與路徑追蹤控制。
| 系統架構圖 |
 |
影片成果展示 |
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|