本論文考慮了全向輪移動機器人的控制問題及其應用。首先,推導了全方位移動機器人的動力學模型,以方便控制設計。在控制器設計中,回授線性化(feedback linearization)用於使系統線性化。然後在線性化系統的基礎上,設計積分型順滑模態(integral sliding mode)控制器進行軌跡追蹤控制,這種控制策略對於模型不確定性和存在於外部的干擾具有良好的強健性。所設計的控制法則會在實驗裝置上實作與測試,透過模擬和實作驗證了控制法則的有效性,並且與經過良好調設後的 PID 控制器進行了性能比較。結果顯示,採用積分型順滑模態控制器的控制系統具有較好的追蹤性能。
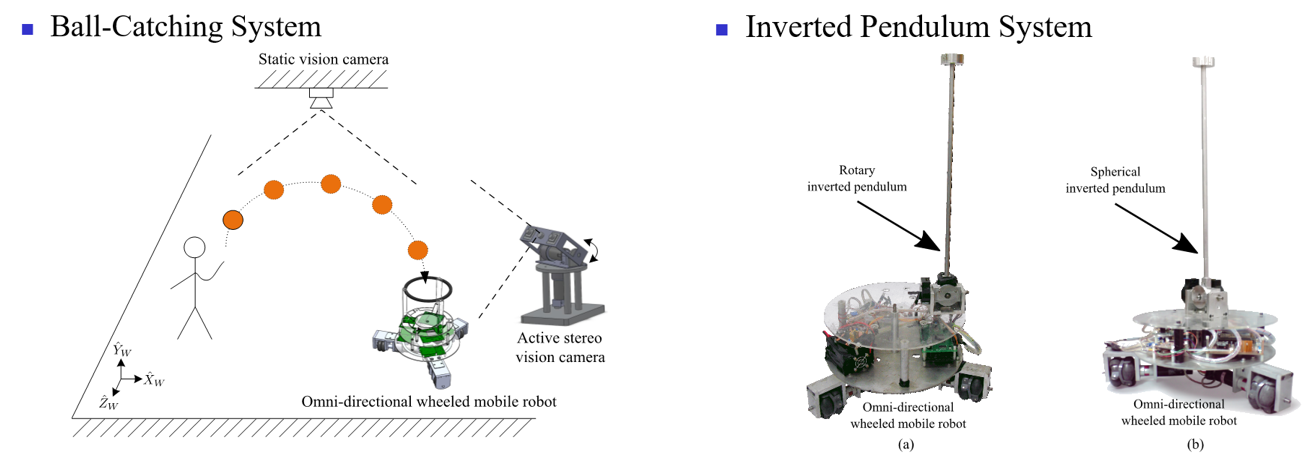
在應用方面,首先,本論文建構了一個包括動態立體視覺相機和靜態相機所組成的機器視覺系統,用於擷取動態中的目標物,並導引全向移動機器人攔接目標物。對於機器視覺的系統上,使用了具有深度學習的卡爾曼濾波器(Kalman filter)來降低視覺測量雜訊並且預估目標物的位置和速度,進而預測目標物的未來軌跡和著陸點。經由預測出來的著陸點,透過靜態相機進行全向輪移動機器人導航來完成攔接目標物之目的。機器視覺追蹤演算法一開始先使用數值模擬,然後再對所設計的演算法性能進行了實作驗證。對於全向輪移動機器人的控制上,利用狀態回授線性化控制法並結合 PID 控制器的追蹤法則。最後,此應用在實作上驗證了所設計的系統能夠準確地攔接目標物。
另一應用則考慮了使用全向輪移動機器人為致動器的可配置倒單擺的平衡控制問題。此系統由兩部分組成,倒單擺與全向輪移動機器人。系統中的倒單擺可以配置成旋轉型(rotary inverted pendulum)或球型(spherical inverted pendulum)。目的是控制全向輪移動機器人在平面上提供平移力以平衡球型倒單擺,以及提供旋轉力矩用以平衡旋轉型倒單擺。這兩種系統的詳細動態模型被推導出來後用於控制法則的設計和模擬驗證。基於二階順滑模態(second-order sliding mode)的穩定控制器是為這兩種系統的設計方法。此外,在我們之前的研究中提出的傳統順滑模態控制器和基於垂直平衡點的線性化系統模型之線性二次調節(LQR)控制器也用於性能比較。以模擬和實作驗證了控制法則的有效性。模擬結果顯示,只有二階順滑模態控制器能使系統的倒單擺在垂直位置上有較大初始偏差的情況下穩定。最後,實驗結果顯示,二階順滑模態控制器優於傳統順滑模態控制器和 LQR 控制器。