控制力矩陀螺儀致動無人自行車之平衡與路徑追隨控制
Balancing and Path-Following Control for an Unmanned Bicycle with Control Moment Gyroscopes
(112級 董守驥)
摘要
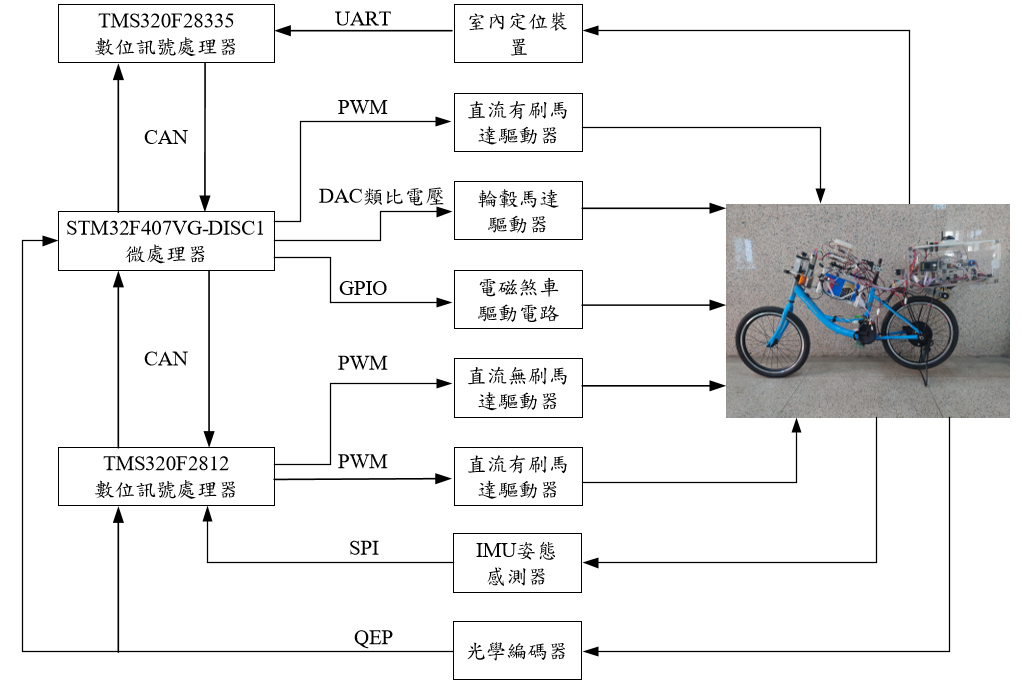
本論文延續本實驗室關於控制力矩陀螺儀致動自行車系統之研究,針對原有機構進行改善,實現具備轉彎平衡能力之控制力矩陀螺儀致動自行車,並整合感測器融合導航系統與路徑追隨控制器,賦予自行車自動駕駛功能。在模型建立方面採用Euler-Lagrange方法,結合自行車之非完整約束條件,建立完整的數學動態模型。並進一步以車體側傾角的數學動態模型為基礎,分析車速與龍頭轉向角對車體平衡狀態的影響,建構出可對應在不同車速下平衡之龍頭轉向角與車體側傾角的函數關係。為設計對應不同操作條件的平衡控制器,將系統模型針對函數導出的各平衡點線性化處理,設計各平衡點狀態下之平衡控制器,並根據不同速度與龍頭轉向角命令建構三維查表陣列,控制器可動態選擇對應控制增益參數。在模擬驗證方面,使用Simulink建立系統動態模型,並進行電腦模擬,首先評估平衡控制系統對轉彎狀態的可行性,隨後加入Stanley路徑追隨控制器,評估系統於自動駕駛境下的軌跡追隨能力。在實作部分,本論文以數位訊號處理器與微處理器開發板為核心,以C語言撰寫平衡控制器、路徑追隨控制器與本實驗室開發之感測器融合導航系統;感測器部分,使用絕對型旋轉編碼器量測龍頭轉向角、增量型旋轉編碼器量測後輪車速與陀螺儀翻轉角,並利用慣性量測單元偵測系統姿態、室內定位模組獲取位置資訊,組建完整的導航與狀態回授系統,實現以控制力矩陀螺儀致動平衡自行車自動駕駛功能。由模擬與實驗驗證所設計之控制系統,可使自行車達成人為遙控與自動駕駛情況下,車體維持平衡狀態不傾倒。
| 系統架構圖 |
 |
| 影片成果展示 |
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|