結構光3D相機系統的設計與實現
Design and Implementation of a Structured Light 3D Camera System
(113級 蘇信憲)
摘要
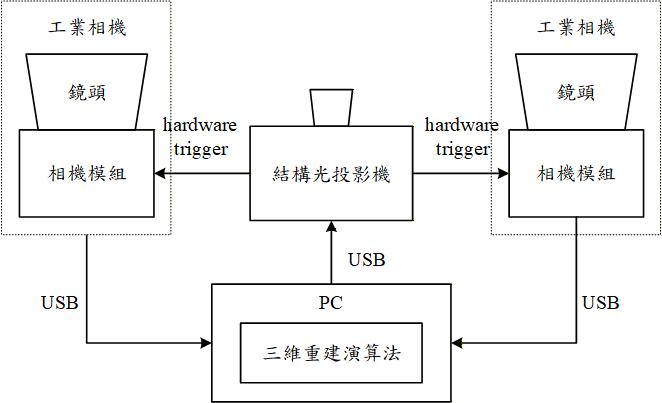
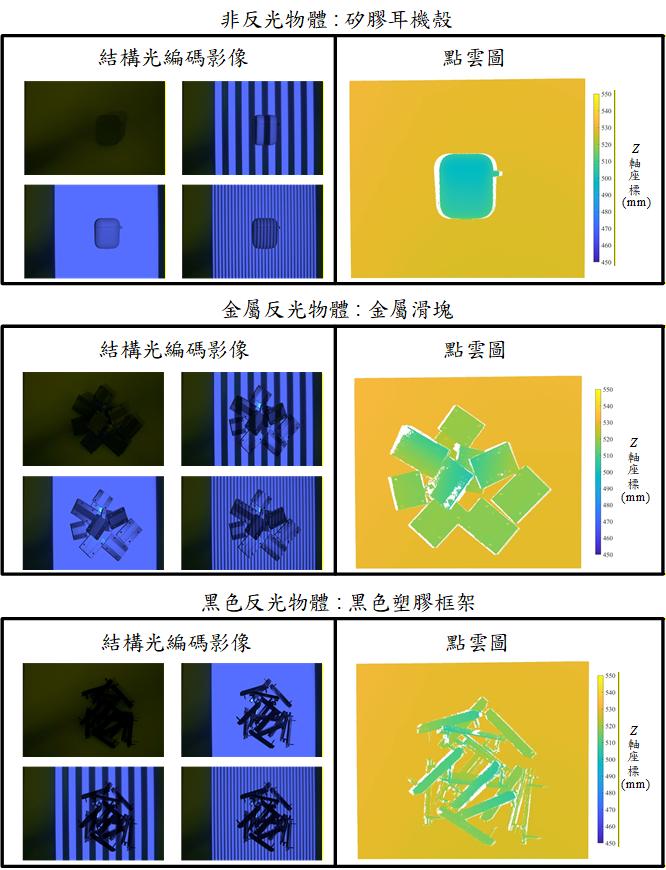
本論文旨在透過整合結構光(structured light)與雙目立體視覺(binocular stereo vision),實現結構光3D相機系統,該系統能計算出目標物體表面的三維座標,並以點雲資料呈現,實現三維重建功能。本論文透過投影相移(phase shifting)與格雷碼(Gray code)的結構光編碼圖案(pattern)至目標物體表面,並由雙目相機同步拍攝影像後,計算出每一像素所對應之編碼值,以此編碼值取代影像原有之特徵資訊,作為立體匹配(stereo matching)過程中的匹配依據,進而計算出目標物體表面的三維座標。在實作上,結構光3D相機系統採用兩組工業相機與一台結構光投影機,並以C++程式語言實現三維重建的演算法。本論文之結構光3D相機系統依據VDI/VDE 2634 part 2工業標準進行系統精度驗證,為了更全面評估系統性能,本論文在誤差分析上分為主要工作距離與整體工作距離。主要工作距離為500 mm處,以反映系統於對焦距離下之量測精度;而整體工作距離為450 mm至550 mm處,反映系統整體之量測精度。本系統在主要工作距離下,平均誤差皆小於0.03 mm,最大誤差皆小於0.06 mm,平均標準差皆小於0.02 mm;在整體工作距離下,平均誤差皆小於0.04 mm,最大誤差皆小於0.08 mm,平均標準差皆小於 0.02 mm。此外,本系統對於非反光、金屬反光與黑色反光物體的重建率可維持於90%以上。由實作顯示,本論文所研製之結構光3D相機系統能穩定地生成目標物體之點雲資料。
| 系統架構圖 |
 |
| 成果展示 |
 |
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|