基於控制力矩陀螺儀之衛星姿態控制系統研究
Study on the Control Moment Gyroscope-based Attitude Control System for a Satellite
(114級 王廷倫)
摘要
本研究旨在探討以控制力矩陀螺儀為致動器之衛星姿態控制系統的建模、控制設計與模擬分析。控制力矩陀螺儀具備高輸出力矩與低能耗的優勢,特別適用於對姿態控制要求反應快速、精度高的任務。本論文首先針對不同的控制力矩陀螺儀類型進行比較。接著分析不同構型之優劣,並根據衛星剛體動力學與控制力矩陀螺儀之力矩產生原理進行數學建模。為解決控制力矩陀螺儀在操作過程中可能遭遇的奇異性問題,本研究模擬並比較多種控制法則(steering laws)。
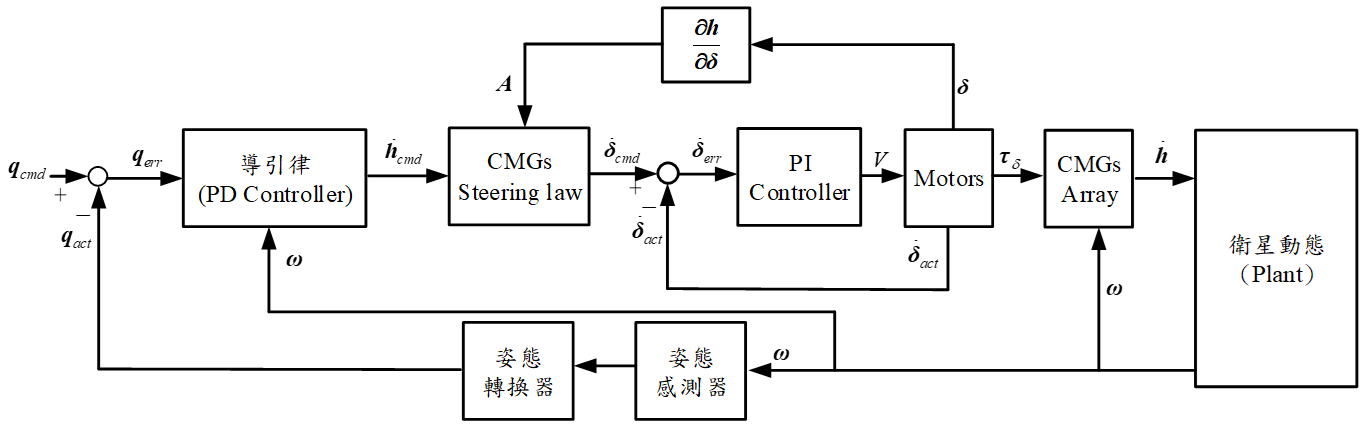
此外,本論文整合了姿態回授與四元數轉換、導引律控制器、控制力矩陀螺儀之控制法則,以及馬達致動器模型,建立一套完整的閉迴路衛星姿態控制模擬系統。鑑於衛星姿態控制屬於高度非線性系統,本研究所設計之導引律控制器乃基於李亞普諾夫穩定理論,採用線性控制律(PD控制)以確保系統在各種初始姿態下能穩定收斂。
本研究建立衛星姿態控制之完整模型,並透過簡化之開迴路與閉迴路模擬進行初步驗證,以確認各模組的正確性與一致性。最終,整合所有子系統與控制法則,構建出可應用於各種控制法則的完整姿態控制模擬平台,進行不同控制法則之性能模擬分析,並對奇異點處理進行可視化測試與系統備援性進行深入探討。
另外本文亦延伸介紹了VSCMG之基礎原理,包含其擺放構型、廣義數學模型及基本控制方法等,以利未來對VSCMG系統進行研究。
| 系統架構圖 |
 |
| 影片成果展示 |
|
 |
有任何問題或建議請點連絡我們
Copyright(C) 2019 控制與訊號處理實驗室
|